浙江盛达铁塔有限公司 浙江省杭州市 311200
摘要:机械加工经常需要用到冲床,但冲床上下料稍有不慎就会造成严重安全事故,而若采取机械手辅助的方式放置材料,可提高生产加工安全性,降低劳动强度。以下设计一种4旋转副的四自由度冲床辅助机械手,利用D-H求解机械臂运动学正反解算方式,再以MATLAB软件计仿真,描绘工作空间,采取PC配合Clipper运动控制卡构建控制系,以速度、位置双闭环控制,编写PLC程序,确保机械手上下料及其在2工位间稳定移动。
关键词:运动控制卡;冲床;辅助;机械手;设计
一般机械手设有3个及以上轴(可编程),以编程实现材料搬运、使用工具等作业[1]。机械手主要适用于自动化数控机床及精细化生产加工环节,完成上下料、装配工件。冲床经常需要上下料,采取辅助机械手操作,可避免人为操作失误,也可降低人员劳动强度,增加工作效率[2]。机械手也可采取单片机[3]、PLC构建,以PC结合运动控制卡的方式,其开放性突出,可以很好兼容编码器和伺服驱动器,开发成本不高,且以上位机及控制卡编程方式,可实现对复杂算法的运动控制[4]。为便于零件上下料、在工位之间往返移动,辅助机械手设置四自由度机械臂,以Clopper和工控机构构成开放式控制系统。
1.辅助机械手结构
设置四自由度,由旋转吸盘、小臂和大臂俯仰、腰部旋转构成,机械手可实现自由前伸、抓取以及移动到指定位置,具体结构的如图1所示。

图1 辅助机械手结构示意图
如图所示,辅助机械手分为腕、肘、肩、腰四个旋转关节,底座腰关节水平旋转移动,其他关节转轴相互平行,该机械手结构紧凑、工作空间较大,符合冲床上下料要求。同时,为降低冲床振动对机械手定位影响,将机械手安装在地面位置。
冲床抓取1公斤板件,以H2311电磁铁吸盘吸附抓取,可抓取较多工件,无需气源支持,对工件表面要求不高[5]。但机械手负载不大,故其工作精度可靠,相关肘、肩、腰等采取伺服电机联接谐波减速度传动。
2.辅助机械手工作空间、运动学反解算法
确定臂长、尺寸等各项参数后,通过各关节转角位置可计算末端吸盘为运动学正解算法,而以末端吸盘位置可以计算各关节转角位置,为反解算法。以D-H方式,通过坐标变换,构建辅助机械手正解方程。
辅助机械手结工作空间如图2所示。
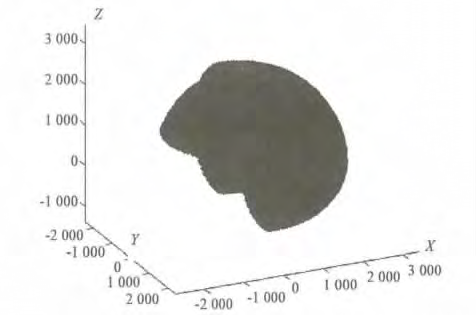
图2 机械手工作空间示意图
该空间是吸盘可运动的空间位置坐标区间,覆盖各个作业关键点,冲床机械手运动回零点为0,900,500,抓取点在400,700,500,工位1抓取点坐标为400,1400,540,工位2的抓取点坐标为-400,1400,540。成品放置在-400,700,540。经过关键点,完成一个循环需要13段路程,在XOY平移,之后沿Z轴上下移动。结合机械手运动正解方程,采用MATLAB软件带入转角关键参数,可以获取吸盘位置,绘制出工作空间,其工作空间可覆盖上述几个关键点,满足设计需求。
求解出关键点运动学反解,便于计算点与点之间移动的运动控制程序编写,在MATLAB中创建一个函数,函数定义中的参数含义包含起始时间、终止时间、开始位置、终止位置及步长。经过13段路径,以0.01s为步长,利用专业函数计算插值,得到吸盘距离各个关键点时候关节转角参数。
3.辅助机械手控制硬件设计
采取PC结合运动控制卡的开放式架构,相比于以PLC为代表的其他控制方式,采取这种运动控制卡,其运算速度突出且可以自编运动控制算法,兼容编码器、伺服电机等,采取模块化的架构方式,也便于设计及维护落实的。Clipper运动控制卡支持四轴运动控制,和计算机连接后,也可实现远距离分布控制,网络以568反线接法,其传输速率在10Mb/s左右。
机械手控制原理为,传动关节码盘反馈编码信号(正交)给Clipper卡,位置闭环构成,可精确控制位置。电动机尾部编码器编码信号传递到伺服电机,速度闭环构成,以此实现双运动控制,减少机械手运送材料时产生过多振动。双闭环控制也实现更精准的运动控制。
4.辅助机械手控制软件设计
机械手的控制软件可设置多个功能模块,分别为(1)初始化程序模块;(2)位置监控程序模块;(3)正反解算法运行模块;(4)运动控制模块;(5)PLC逻辑控制模块;(6)示范和再现程序。
其中,系统初始化完成Clipper变量初始化,设置PLC启停。位置安监控程序采集机械手关节角度数据并上传,计算末端位置状态,并将参数信息反馈到上位机。PLC逻辑控制在后台循环性运行,主要会电机使能、限位、伺服报警等数字信号进行监控,对内部程序执行状况及变量状态进行监控,示范及再现程序则完成示范模式的运动及动作,实现示范时候各运动持续进行。运动控制程序由各个运动控制程序构成,一些复杂的运动通过各个运动控制模块协同配合完成,单个关节角度运动采取相对运动模式控制INC实现,关节执行“&na”则停止运动,“n”对应四个电机,“a”为停止运动指令。多关节的运动则采取绝对运动ABS,P211-P214变量储存电机到达角度,多关节同时停止使用&na”命令停止4个电机运动,快速回零系统以绝对坐标的“RAP-ID”快速运动命令控制。
5.结束语
综上所述,冲床机械手以PC配合Clipper运动控制卡的架构设计,可进一步控制开发耗时及成本, 其关机械手关节码盘脉冲信号反馈到Clipper卡后,电动机编码器反馈到伺服电机驱动器处,以此实现速度和位置的双闭环控制,精确定位、精准控制,可稳定传递工件,避免传递运动中产生过多振动。
参考文献
[1]耿青玲.基于运动控制卡和视觉系统的桁架机械手分拣系统的应用[J].机械工程师,2021(02):80-82.
[2]赵春云. 基于PCI运动控制卡的上位机控制系统设计与实现[D].兰州理工大学,2019.
[3]杜雪亮. 基于工业PC运动控制的陶瓷制品全自动取放料机械手的研制[D].天津工业大学,2016.
[4]洪晓燕,王友林,刘坤,张文,徐栋.基于运动控制卡的6-DOF切削机器人控制系统设计[J].制造业自动化,2013,35(07):1-2+9.
[5]庄云良. 基于PCI运动控制卡的五轴板料渐进成形数控系统的研究与开发[D].南京航空航天大学,2012.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



