(1. 中航工业飞行仿真航空科技重点实验室,陕西 西安 710089;
2. 中国飞行试验研究院,陕西 西安 710089)
摘要:为满足LSO模拟培训需求研究舰载机在下滑着舰时飞行员模型,以人工着舰时飞行员控制飞机进行轨迹跟踪为背景,以着舰时惯用的“反区”驾驶技术为依据,建立着舰任务下数字飞行员模型,结合某型舰载机搭建飞行员控制律,并对控制增益参数进行自适应设计,使其能够反映着舰任务下的飞行员操纵特性。
关键词:LSO培训;自主着舰;飞行控制
引 言
舰载机着舰必须依赖舰载指挥官(LSO)进行现场指挥,适时向飞行员发送指挥指令,及时修正着舰实时航迹,确保舰载机着舰安全。目前对LSO的培训流程一般分为理论培训、陆基培训和舰基培训三个阶段,后两个实操阶段的成本和风险较高,因此可在理论培训之后先通过模拟培训的方法,帮助学员快速提升指挥技巧与经验。通过仿真手段构建LSO模拟指挥环境,但培训过程中需要飞行员配合响应指挥口令完成着舰,而具备资质的舰载机飞行员是非常稀缺的。因此,本文设计了一套控制律控制飞机代替飞行员,协助LSO完成培训过程,提高培训效率。
1 着舰控制律设计要求
LSO职责主要是通过其指挥帮助飞行员提高看灯、对中与保角的趋势控制能力。据此可将控制律目标细化,“看灯”可由对下滑道纵向偏角的控制转化为高度控制,“对中”由对下滑道横向偏角控制转化为侧偏距控制,“保角”即为对迎角的控制。
通过资料数据分析,总结得到设计时应遵循的时域指标如下:修正3~4m的高度偏差调节时间约5.6s,超调量为7%;修正2~3m的侧偏距偏差调节时间约6.8s,超调量为15.4%。
2 着舰控制律设计
本文在控制律设计上使用了先低阶、后高阶的方法。第一步在低阶系统中将飞机本体模型简化,只保留关注的传递函数,分别构建迎角和俯仰角回路的低阶控制结构,使用零极点配置方法获得控制参数初值;第二步回归高阶模型,以时域指标为目标,在已得参数初值的基础上通过寻优算法进行定目标寻优,完成参数精调。
2.1 纵向通道设计
由于着舰任务的特殊性,本文的控制策略设计为使用发动机推力控制迎角,这样可以在实现“动力补偿”的同时满足前文提到的“保角”控制要求[1]。
2.1.1 低阶系统设计
(1).俯仰角控制回路
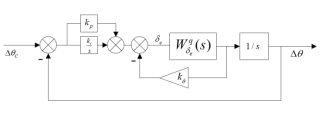
图1 俯仰角控制回路结构图
俯仰角控制回路如图1所示,由飞机纵向小扰动方程可以求得升降舵到飞机俯仰角速率的传递函数为:
![]() (1)
(1)
控制结构中使用增稳反馈增加俯仰阻尼,通过PI控制器实现俯仰角指令的定量控制。推导该控制结构的传递函数如下:
 (2)
(2)
通过调整![]() ,将系统配置为具备合适性能的一阶和二阶系统的串联组合,调整参数过程中首先保证系统稳定,将虚轴附近零极点构成偶极子,同时尽量将主导极点的阻尼比调至合适位置。调参后得到俯仰角控制回路的零极点图如图2所示:
,将系统配置为具备合适性能的一阶和二阶系统的串联组合,调整参数过程中首先保证系统稳定,将虚轴附近零极点构成偶极子,同时尽量将主导极点的阻尼比调至合适位置。调参后得到俯仰角控制回路的零极点图如图2所示:
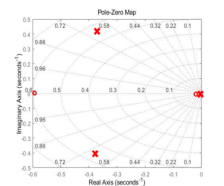
图2 俯仰角控制回路零极点图
(2).迎角控制回路
迎角控制回路的设计及控制参数求解过程与俯仰角回路一致,迎角控制回路如图3所示,由飞机纵向小扰动方程可以求得油门到飞机迎角的传递函数见式3,控制结构的传递函数见式4,调参后得到迎角控制回路的零极点图如图4所示:
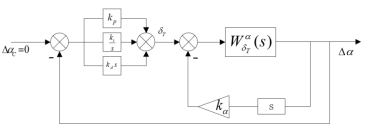
图3 迎角控制回路结构图
![]() (3)
(3)
 (4)
(4)
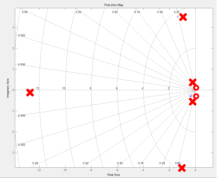
图4 迎角控制回路零极点图
2.1.2 高阶系统设计
高阶系统被控对象为完整的飞机纵向高阶模型,而且舰载机姿态控制时![]() 对迎角的影响不可忽略,因此将
对迎角的影响不可忽略,因此将![]() 信号引入动力补偿回路,以适当抑制其影响,控制结构见图5所示。
信号引入动力补偿回路,以适当抑制其影响,控制结构见图5所示。
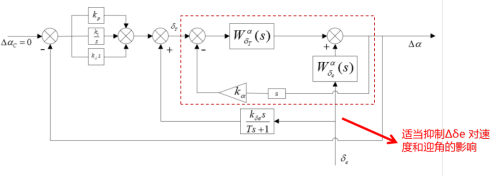
图5 高阶系统迎角控制回路
写出完整的控制结构传递函数如下:
![]() (5)
(5)
之后对控制参数进行精确调整:动力补偿回路的参数可由轨迹角对俯仰角的响应寻优得到,姿态控制回路的参数可由俯仰角对俯仰角指令的响应结果寻优得到,进行多次寻优后,两个控制回路的响应均可达到预期目标。此时轨迹跟踪性能与之前相比有明显改善,且姿态响应迅速,如图6所示。
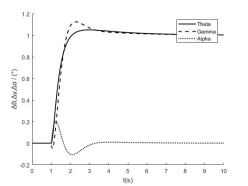
图6 指令ThetaC=1时舰载机的响应
在此基础上,设计PID控制器将高度偏差经过计算生成俯仰角指令,形成高度控制外环。最终得到高度控制回路响应结果如下:所得控制律的高度响应指标与试飞数据接近,跟踪![]() 的阶跃指令时调节时间5.2s,超调量为7.3%;跟踪模拟飞机下滑的高度斜坡指令时效果理想,无稳态误差。
的阶跃指令时调节时间5.2s,超调量为7.3%;跟踪模拟飞机下滑的高度斜坡指令时效果理想,无稳态误差。
2.2 横向通道设计

图7 侧偏距控制回路
横向控制回路主要响应侧偏距控制要求,由于着舰阶段飞机姿态变化很小,故可通过小角度假设,获得飞机横航向各参数之间的近似关系[3],从而建立了滚转角与其他横航向参数的关系如式6,侧偏控制问题也就转化为滚转角的控制问题。
 (6)
(6)
横向控制结构由滚转角内回路与侧偏距外回路构成。参数求解的思路过程与纵向通道类似,低阶系统主要考虑滚转模态。由上式推导横向操纵量到滚转角的传递函数,继而推导侧偏距控制回路的传递函数如下:
 (7)
(7)
调参后得到侧偏控制回路的零极点图如图8所示:
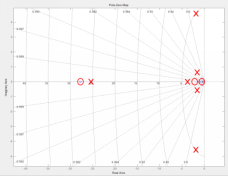
图8 侧偏控制回路零极点图
高阶系统使用完整模型,为改善侧偏距响应指标,以前文时域指标作为寻优目标,最终跟踪![]() 的阶跃指令时调节时间5.7s,超调量为12.7%
的阶跃指令时调节时间5.7s,超调量为12.7%
3 仿真验证
在全量模型中对控制律进行验证。设定着舰时飞机下滑道纵向、横向偏角变化不超过中线相机的显示范围。仿真试验具体设定为飞机在距舰尾1.8km处,高度116.1m,表速300Km/h,迎角11°配平后开始仿真,并在初始时刻加入以下阶跃指令:
(1).下滑道纵向偏角指令分别为3.7°、4.0°和4.3°;
(2).下滑道横向偏角指令分别为0.3°、0.6°和0.9°;
(3).迎角指令分别为12°和13°。
飞机的响应如图15所示。


(a) 下滑道纵向偏角指令响应 (b) 下滑道横向偏角指令响应

(c) 迎角指令响应
图9 不同控制指令下的飞机响应
整理输入最大偏差阶跃指令时的响应指标如下表所示,从时域上看,各通道的响应结果符合设计目标,与真实情况一致;此外从频域上看,所有控制模态满足6分贝,45度的一般稳定性要求。
表1 输入最大偏差阶跃指令时的响应指标
调节时间(s) | 超调量 | 幅值裕度(dB) | 相位裕度(°) | |
纵向偏角控制 | 5 | 4.7% | 16.75 | 114.5 |
横向偏角控制 | 7.2 | 12.8% | 18.4 | 76 |
迎角控制 | 6 | 10.3% | 9.68 | 92 |
结束语
本文针对LSO培训系统的要求设计了一套自主着舰控制律,结合某型舰载机搭建飞行员控制律,并对控制增益参数进行自适应设计,使其能够反映着舰任务下的飞行员操纵特性,可在培训时根据教员的指令改变舰载机的下滑轨迹与迎角,从而模拟出真实舰载机着舰时可能遇到的各种着舰状态。该控制律满足了LSO地面模拟培训使用需求,为LSO模拟培训平台的建立奠定了理论基础。
参考文献:
[1] 李鑫,吴文海,王春晖,梁佐堂.舰载机着舰飞行阶段操纵特性研究.飞行力学,2014,32(6).
[2] 倪灯塔.舰载飞机动力补偿系统控制律设计研究.吉林大学,2009.
[3] 张杨,吴文海,汪杰.舰载无人机横侧向着舰控制律设计.航空学报,2017,38:1-6.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



