单位:山东建筑大学 250101
本文介绍了一个六维力/力矩传感器的构造和工作原理。描述了基于铰接式Stewart平台设计传感器结构的方法。详细介绍了连接上下平台的六根连杆与外力之间的关系,将力敏感元件粘贴在六根连杆上,通过感受平台变形来检测六维力与力矩。
关键词:Stewart平台 力敏感元件 平台变形
1 Stewart平台设计要求
Stewart平台又为并联机构,与串联机构相比没有了驱动器累积误差。其精度高,驱动器可以放在基座上,减少了末端部件质量、惯性,动态性能好。越来越多的研究人员将其应用于微创手术机器人。手术器械在人体内主要进行缝合打结、组织触摸、钝性分离等工作[1]。
综合腔镜手术机器人的工作环境以及相应的技术操作,设计的微型力和力矩传感器要满足以下要求:(1)测量范围与精度:传感器在x,y,z方向上的力和力矩监测范围要达到10N和150N·mm,精度要达到0.3N和3N·mm(2)灵敏度:设计的传感器的精度、带宽等指标也要满足要求。(3)尺寸:尺寸要足够小,外径要在10mm以内.(4)生物兼容性:由于传感器要进入患者体内,因此应该选择生物兼容性较强的材料进行设计。
2 Stewart平台配置
基于Stewart平台的力/力矩传感器非常适合这一应用。优点包括高刚度、适应性强、环形形状和可伸缩性。此外,只需要线性力变换器,可以放置在腕部和夹钳之间,使用应变计来测量力的大小。Stewart平台配置由一个相当于具有六个单轴双向力传感器的网状系统的结构组成。每个力传感器通过两个铰链独立连接到两个平台,由此产生的铰接系统保证了高刚度,并可以为三个坐标轴的载荷提供不同的测量范围。选用的六个力变换器的布置方式如图1所示,连接上平台和连杆的柔性铰链的形心以点 1’2’3’4’5’6’来表示,连接下平台和连杆的铰链形心用 1”2”3”4”5”6”来表示,六根连杆和柔性铰链将Stewart平台的上下平面连接起来并使两个平面保持平行,轴线O’O”作为两个平台圆周的中心,其中 为连杆与Σ”之间的夹角,2
为连杆与Σ”之间的夹角,2 是3’’O’’4’’夹角,即传感器链接下平台的铰链中心与传感器中心轴构成的角度。
是3’’O’’4’’夹角,即传感器链接下平台的铰链中心与传感器中心轴构成的角度。
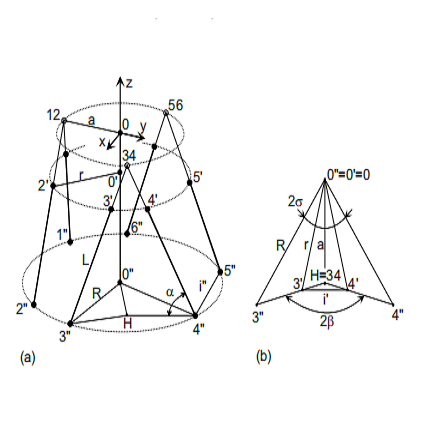
图 1Stewart平台几何参数
传感器通过感受外部载荷可使弹性体发生变形,再将信号放大后输出到中央控制器。Stewart平台由六轴连杆加上下平台组成,应变计贴在连杆上,当外力作用在传感器末端时,Stewart平台由于受力,其弹性体结构就会发生弹性形变同时产生相应的应力,应变计就可以根据弹性体发生的物理变化把弹性体的应变检测出来,通过惠斯通电桥的转变,这时应变计的电阻变化就可以转换成电信号变化,这样电信号经过处理就可以得到想要的力信号。为了获得真实的力信息,传感器最好靠近仪器尖端,从而最小化由仪器和人体器官之间的摩擦而造成的误差。传感器应与驱动机构解耦,以防止驱动力、反弹和摩擦对传感器性能的影响。选择了腕部和夹钳之间的位置,因为传感器仅处于夹钳驱动力的位置。它不受关节附近位置那样受关节驱动力的影响,测量也相对准确。
变换器1和2分别表示在传感器顶部平台上施加在传感器轴交点的 和
和 的力如图2所示。
的力如图2所示。
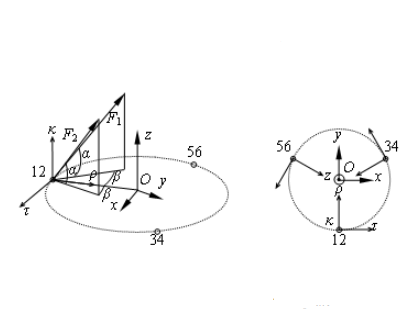
图 2 施加给上圆盘的力
力F1和F2的结果可以分解为径向分量(方向为 )、切向分量(方向为
)、切向分量(方向为 )和正常分量(方向为
)和正常分量(方向为 )。这种分解也适用于F3和F4,F5和F6在交叉点3、4和5、6进行力的分解。
)。这种分解也适用于F3和F4,F5和F6在交叉点3、4和5、6进行力的分解。
M.Sorli[2]计算出外加载荷与六根连杆轴向力之间的关系如式所:
 =-
=-

 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
式中 连杆与平面∑”的夹角,(°);2
连杆与平面∑”的夹角,(°);2 连杆1和2在下平面上投影夹角,(°);2
连杆1和2在下平面上投影夹角,(°);2 角1’’O”2”,(°)
角1’’O”2”,(°)
 --------外作用力/力矩(N,N∙mm).
--------外作用力/力矩(N,N∙mm).
 -----六根连杆轴向力(N)。
-----六根连杆轴向力(N)。
通过以上公式可以将传感器收到的外部载荷全部转换为Stewart平台连杆的拉压力。
4结论
提出了一种能够测量六个力和力矩分量载荷的网状结构传感器。该系统采用的是Stewart平台所设计的弹性体,测量原理是将应变计粘贴于六根连杆上,将每一根连杆视为二力杆,应变计通过感受连杆变形产生电阻变化,通过转换器转换为电压变化进而得到力变化。
参考文献
[1]金振林,赵现朝,高峰.新型灵巧手指六维力传感器参数设计方法研究[J].仪器仪表学报,2003,24(4): 371-315.
[2] SORLI M,PASTORELLI S.Six-axis reticulated structure force/torque sensor with adaptable performances[J].Mechatronics,1995,5(6):585-601.
[3] 于靖军,裴旭,毕树生,等.柔性铰链机构设计方法的研究进展[J].机械工程学报,2010,46(13):2-13.
[4]仇鑫,尤晶晶,王林康,等.Stewart衍生型并联机器人的运动雅可比矩阵推导[J].机械设计与研究,2020,36(6):79-84.
址:山东省济南市历城区唐冶街道雪山合苑17号楼1单元404
姓名:李磊
联系电话:15806630507

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号