山西工程技术学院,山西省阳泉市, 045000
摘要:无人机是现代新兴的一种可飞行科技产品,与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务。目前其在航拍、农业、植保、快递运输、灾难救援、测绘、新闻报道、电力巡检、救灾、影视拍摄等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。无人机一出世便带有智能的色彩,随着经济和科技的发展,无人机也必将越来越趋向智能化以满足人们更高的需求。
关键词:智能无人机;智能监测;MPU9250;STM32
单片机是将整个计算机系统集成到-块芯片中,多以Intel 8031为核心组成中央处理器,包括CPU、ROM、RAM、1/0接口、UART、 定时器/计数器、A/D转换器等多个模块,外围配以少量的接口器件组成。单片机集成度高,由此提高了可靠性,抗干扰能力强,嵌入性能好。其功耗小、体积小、接口灵活、易于产品化。因此,基于单片机的飞行监测系统具备丰富的模拟信号接口、方便灵活的数字接口和串行通信接口等硬件资源,能方便的组成各种智能化的控制设备,满足无人机的飞行智能监测需求,具有很高的性价比。
A9G 是一个完整的四频GSM/GPRS+GPRS/GPS 模块。相较于前代A6/A7,A9/A9G 的集成度更高,核心芯片的成本降低也使得整个方案性价比更高。方便应用于各种物联网硬件终端场合。
可利用AT命令控制A9G获取GPS信息,并且发送短信和上传数据。
MPU9250集电路总线(IIC)传输速率可达400k Hz/s,串行外设接口(SPI)传输速率可达20MHz/s。陀螺仪的角速度测量范围最高达±2 000 (°) /s, 具有良好的动态响应特性。加速度计的测量范围最大为±16g (g为重力加速度) , 静态测量精度高。电子罗盘采用高灵敏度霍尔型传感器进行数据采集, 磁感应强度测量范围为±2000(°)/s,具有良好的动态响应特性。加速度计的测量范围最大为±16g(g为重力加速度),静态测量精度高。电子罗盘采用高灵敏度霍尔型传感器进行数据采集,磁感应强度测量范围为±4800uT,可用于对偏航角的辅助测量。
利用MPU9250内部的陀螺仪、加速度计和电子罗盘,可以对三个轴的角速度、加速度、磁感应强度进行测量,利用四元数法解姿态进行融合处理,得到姿态信息。
Bosch 的BMP280 是一种专为移动应用设计的绝对气压传感器。该传感器模块采用极其紧凑的封装。得益于小尺寸和低功耗特性,这种器件可用在如移动电话、GPS 模块或手表等电池供电型设备中。
与上代产品相同,BMP180、BMP280 也基于Bosch 成熟的压阻式压力传感器技术,具有高精确度和线性度,以及长期稳定性和很高的EMC 稳健性。多种设备工作选择带来了最高灵活性,可以在功耗、分辨率和滤波性能方面对设备进行优化。为了让开发人员尽可能容易地进行设计导入,我们针对使用样例提供了一套经过测试的默认设置值。
本设计中BMP280外挂在MPU9250的IIC接口上,以节省单片机资源。
AM2302数字温湿度传感器是一款含有已校准数字信号输出的温湿度复合传感器。它应用专用的数字模块采集技术和温湿度传感技术,确保产品具有极高的可靠性与卓越的长期稳定性。传感器包括一个电容式感湿元件和一个NTC测温元件,并与一个高性能8位单片机相连接。因此该产品具有品质卓越、超快响应、抗干扰能力强、性价比极高等优点。每个AM2302传感器都在极为精确的湿度校验室中进行校准。校准系数以程序的形式储存在OTP内存中,传感器内部在检测信号的处理过程中要调用这些校准系数。单线制串行接口,使系统集成变得简易快捷。超小的体积、极低的功耗,信号传输距离可达20米以上,使其成为各类应用甚至最为苛刻的应用场合的最佳选则。温度测量分辨率为0.1°C,精度±0.5℃,检测范围-40°C ~ 80°C;湿度检测分辨率为0.1%RH,精度为±2%RH (25°C),检测范围0%RH ~ 99.9%RH。符合应用需求。
DHT22起始信号拉低800us,用户主机(MCU)发送一次起始信号(把数据总线SDA拉低至少800us)后,AM2302从休眠模式转换到高速模式。待主机开始信号结束后,AM302发送响应信号,从数据总线SDA串行送岀40Bit的数据,先发送字节的高位;发送的数据依次为湿度高位、湿度低位、温度高位、温度低位、校验位,发送数据结束触信息采集,采集结束传感器自动转入休眠模式,直到下一次通信来临。
系统需要检测速度、加速度、方向、坡度、海拔、温湿度等信息,需要多传感器融合。并且需要通信模块进行短信发送和数据上传。经过调查研究,决定利用陀螺仪、加速度计、电子罗盘采用四元数法进行姿态融合,从而感知机身空间状态,如倾斜角度和前进方向,并且可以判断飞行倾斜度;由于海拔高度难以直接测量,故采用气压计检测环境气压,进而判断海拔高度;环境温度和湿度可利用温湿度传感器进行检测;利用GPS获取位置信息,并结合加速度计进行速度测量;利用GSM/GPRS进行短信和数据的发送;利用加速度和姿态信息可以判断机身是否受到撞击或者倾倒;按键可以设置锁定无人机以防盗,关闭屏幕显示等。并接入中移动OneNet平台,方便上传位置温度等数据进行远程查看。采用单片机为主控制器,利用其丰富的外设,便于各传感器模块的信息获取和处理,以及和通信模块的连接。通过查找和调查,选定陀螺仪、加速度计和电子罗盘集成传感器MPU9250、气压传感器BMP280、温湿度传感器DHT22、GSM/GPRS\GPS/BDS一体模块A9G、TFT液晶屏、STM32F407ZGT6等作为本设计信息采集处理模块。
系统框图如下:
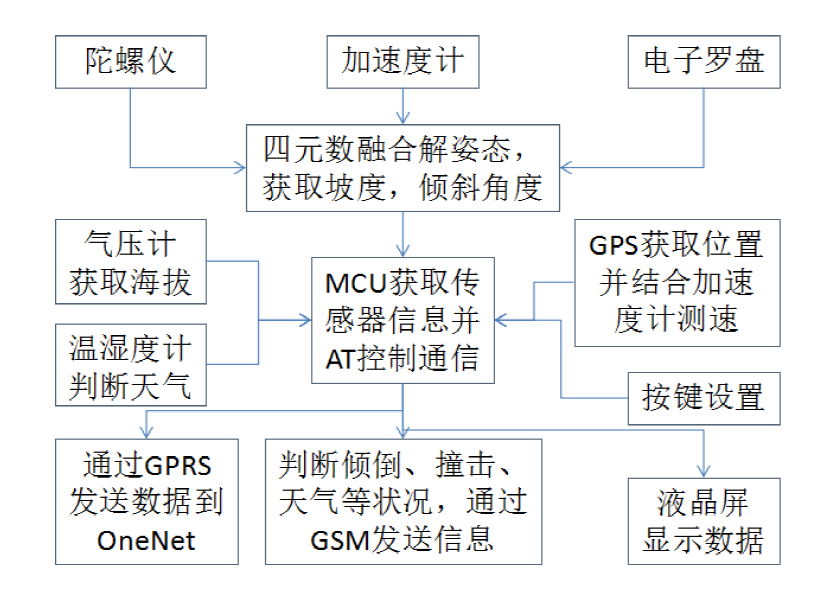
本设计利用MPU9250、BMP280、DHT22、GPS等传感器模块获取了速度、加速度、方向、坡度、海拔、温湿度等信息,利用GSM、GPRS通信模块实现了短信发送和上传数据到云平台,并通过按键和液晶屏进行了人机交互,最终完成了集飞行信息、环境状况、安全提醒于一体的无人机智能监测系统。
虽然本设计完成了传感器信息的采集处理和融合,实现了数据的显示和发送,但是仍然存在诸多不足,需要在后续的工作中完善。
[1] 杜善义,杨博明.飞行器结构智能化研究及其发展趋势[J].宇航学报,2007,28(4):773-774.
[2] 荆学东,潘翔.基于四元数的四轴飞行器姿态控制[J].现代电子技,2018,41(16):116-119.
[3]黄成功,邵琼玲,王勇.基于单片机的通用型无人机飞行控制系统研究[J].飞机设计,2009,29(6):20-20.
[4]牛轶峰,沈林成,张国忠. 无人机系统自主控制技术研究现状与发展趋势[J].国防科技大学学报,2010,32(3):115-116.
作者简介:
乔守印(2005-06),男,籍贯:山西省吕梁市,汉族,本科 。
常妮娜, (1993年),女,籍贯:山西省长治市, 汉族 ,助教
4

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



