中建八局华中建设有限公司湖南分公司
摘要:随着我国社会的不断发展,大型民用基础类设施需求陡然上升,而在这类如机场、体育场馆、车站等大型民用基础设施所面临的测量难题层出不穷,工期长、施工跨度大、施工区域广等特点均不同程度为测量工作带来困扰,本文通过在长沙机场改扩建工程T3航站楼中实际遇到的问题并用相应的方法予以解决。
关键词:施工测量;复杂场景;控制点;后方交会
1 工程概况及测量难点
长沙机场改扩建工程T3航站楼施工总承包项目位于湖南省长沙市中心以东约24km。总建筑面积为531941.3![]() ,建筑物最大结构高度为43.300m。建筑层数5层,地下1层,地上4层。整个航站楼由大厅和指廊组成,指廊采用五指廊构形,分为F区大厅及A、B、C、D、E区五条指廊,其间由伸缩缝兼防震缝分开。为满足工程施工特点,本工程的平面控制网按照“先整体后局部,由高级到低级,分级布设逐级控制”的原则,设置三级控制网,各级控制网相互衔接,统一为整体系统。高程控制网则以发包人提供的水准点为依据,采用闭合水准路线,按二等水准精度施测。
,建筑物最大结构高度为43.300m。建筑层数5层,地下1层,地上4层。整个航站楼由大厅和指廊组成,指廊采用五指廊构形,分为F区大厅及A、B、C、D、E区五条指廊,其间由伸缩缝兼防震缝分开。为满足工程施工特点,本工程的平面控制网按照“先整体后局部,由高级到低级,分级布设逐级控制”的原则,设置三级控制网,各级控制网相互衔接,统一为整体系统。高程控制网则以发包人提供的水准点为依据,采用闭合水准路线,按二等水准精度施测。
由于机场这类大型基础类设施有着跨度较大的作业区间,存在多处同时施工的情况能够进行测量作业的区域充满不确定性,要想在各个区域完成控制点布设实现精确定位,就既要保证各个区域控制点具有良好的通视的同时还要保证控制点的可靠性,这样全站仪采用后方交会法才能在各区域实现精准定位,通过后方交会法的原理知道那么要想提高定位精度,后方交会法在最佳角度、距离及位置上的选择是尤为重要的。
2 测量控制点布设
2.1 多方协同联测模式及控制点质量把控
长沙机场改扩建工程T3航站楼施工总承包项目是由我司牵头,多责任单位一同参与完成的,但是各家所采用的坐标系不同会为后期施工交界交接造成重大的影响,并且也会在平时工作中的数据图纸对接形成不可控的干扰,因此务必要让交叉单位进行协同联测,对存在争议的边界线、控制点进行统一联测协商,统一规定使用“长沙2000独立坐标系”为联测统一坐标系。确定好了坐标系,联测工作才能顺利开展,由交叉单位一同参与,一同对边界重要的一、二级控制点、边界线进行联测,在现场一同拍照取证确认数据,由多方共同签字认可该边界处控制点即可。
由于一级、二级控制点为机场主要的定位信息共享平台,多方总承包单位都会涉及该控制点信息,因此把控好这些控制点的质量尤为重要。一级控制网为K1~K9九个控制点构成,其分布见图2.1。
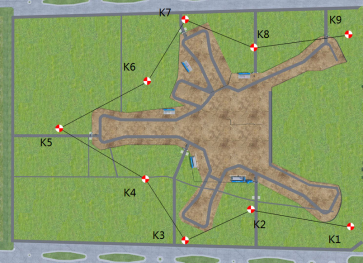
图2.1 一级控制网布设
为保证控制点长期稳定保存,一级控制点埋石做法见图2.2。
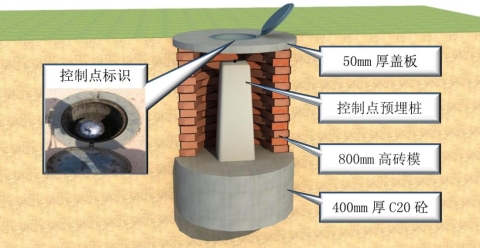
图2.2 一级控制点埋石做法
二级控制网为J1~J10十个控制点构成,其分布见图2.3。
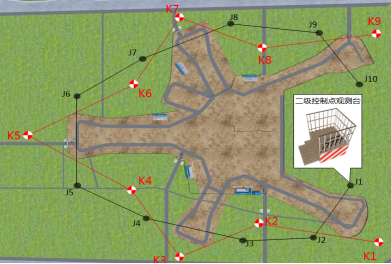
图2.3 二级控制网布设
为减少视线遮挡影响,二级控制点点位砌筑1.5M×1.5M×1.0M观测台见图2.4。
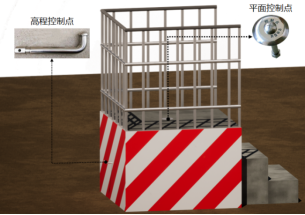
图2.4 二级控制台做法
2.2 测量控制点联测共享模式
长沙机场T3航站楼改扩建工程为航站楼的主体工程,其附近涉及高铁、磁浮、地铁、市政、高架等穿插施工6大类交通工程,与9家单位联合进行施工,如何去保证所有项目施工准确无误能够顺利相互衔接工作是主要难题,固测量工作联测联动和信息共享起到关键性作用。
测量工作的联测联动和信息共享主要是围绕控制点展开的,首先各家施工单位需自行对负责区域的控制点进行测量统计,其次需各家施工单位对边界的共用控制点信息进行核对,如若不符,需相关责任方进行联测,对最后的联测结果进行统一确认保存,并以该联测结果划为各方的最后控制点真值。
3 复杂场景下基于全站仪的精准定位方法
由于该工程施工跨度大、周期长、作业面繁多密集,在上述许多布设的测量控制点无法满足全周期监测和通视要求,随着主体建筑升起,最初的测量控制点会被覆盖、破坏或遮挡,需要布设新的测量控制点满足工程测量需求,但由于施工作业面密集繁多测量空间作业受限、主体建筑庞大高耸通视条件差等各种因素影响,无法使用传统的导线测量完成控制点的布设,此时我们采用了基于全站仪的后方交会法来完成控制点的布设,因此需要研究掌握后方交会原理,在最大程度上降低误差带来的影响,满足测量控制点的精度要求。
3.1 全站仪后方交会基本原理
全站仪后方交会是指通过观测待测点到两个已知点的距离快速得到待测点坐标,是在室内或通视情况较差的情况下建站或测点的方式方法。

图3.1 后方交会原理图
由图可知,未知点P到已知点A的距离为S1,到已知点B的距离为S2,则未知点P处数学模型为:
![]()
其中
![]()
利用三角形的余弦定理可得
![]()
即
![]() (4)
(4)
将(4)式全微分可得

![]() =206265’’
=206265’’
将(1)式全微分可得

将式(5)代入式(6)可得

由误差传播定律可知

P点的点位误差为
![]()
一般全站仪测距中误差:
![]()
式中:a为固定误差,b为比例误差,D为测得的边长。
将(10)式代入至(9)式可得

在一般情况下,边长一般在1KM~2KM之间,且在点位布置合理的情况下,所测边长基本不会有太大差距,就测量精度而言可以视为
![]() 。
。
3.2 以“饱和式”加密点进行精度复核
从上文后方交会原理可知,要想采用该方法必须至少有2个已知控制点,固为满足后方交会而布设的饱和高精度的已知控制点是关键,文章第2节已对控制点的布设有了详细的阐述,现需要对这些控制点的精度保持控制检核为该小节需要解决的问题,为后文顺利实施后方交会做铺垫。
那么这么多的控制点,如何去实现快速且精准的复核呢,我们在这些控制点附件设置了若干个加密点,即为“饱和式”的加密点,这些加密点都是由导线测量完成的,其控制网等级为国家四等,每次复核时,可依靠该控制点附近可通视的若干加密点进行复核,当至少有1个加密点与该控制点的复核数据无误时即为符合精度要求。
3.3 “饱和式”加密点成效
表3.1
点名 | X(m) | Y(m) | 备注 |
J2 | 97073.2850 | 73521.9690 | 已知点 |
TK4 | 96641.8950 | 73692.3630 | 加密点 |
J10 | 96868.3904 | 73841.3748 | 已知点 |
B1 | 96961.5675 | 73804.3059 | 加密点 |
BM1 | 96866.5301 | 73863.7889 | 加密点 |
BM2 | 96809.3998 | 74000.1877 | 加密点 |
表3.2
点名 | 点位中误差(m) |
J10 | 0.0086 |
B1 | 0.0112 |
BM1 | 0.0111 |
BM2 | 0.0153 |

图3.2 加密点精度复核分布图
由上表可知,J2和J10是已有的两个二级控制点,其余点为布设在这两个控制点附件的加密点,是由国家四等导线测量所得的加密点,其中BM1和BM2还布设在机场F区二楼室内的加密点,这些加密点都会为J2和J10提供复核参考,并且在某些特殊情况下,在精度要求范围内,还可以引用这些加密点当四等控制点来进行工程测量。
由于机场这类大型民用基础类设施都有着大跨度的室内环境,随着主体建筑大部分完成之后,主体建筑内部需要更多控制点用来通视,而室内是由于卫星信号受限且通视条件差,要想在室内布设若干控制点,首先需要对其主体外围控制点的精度有严格把控的前提下,采用如下基于全站仪的后方交会法来在室内布设控制点。
3.4 后方交会法成效
全站仪后方交会操作方便,只需在待测点架一次仪器,测得两已知点的距离,仪器自动计算坐标值,在上述3.2和3.3节中研究了如何对控制点进行精度复核,以保证已知点的准确性。严格控制未知点与两个已知点的距离,尽量缩小差距保持一致,尽最大可能去减少不必要的误差,交会角度应尽可能保持在40°-150°之间,角度不应过大也不应过小,最佳精度应保持在90°-100°之间,在交会最佳区域待测点在已知点中垂线交会精度最好,应避免待测点在危险圆附近。
4 结论
本文从机场这类复杂场景下的工程测量角度出发,积极探索和寻找制定复杂场景下控制点布设和后方交会最佳策略,从最基本的控制点布设和后方交会方法找出其中的共性与特点,结合在复杂场景下的应用来规划出基于全站仪的精准定位策略,并通过实验验证该策略的可实施性与优势性。得出的主要结论有如下2个方面:
(1)总结出控制点在大跨度施工场景下的巧妙布设,提出了联测模式用以解决多方施工测量数据无法统一的难题。
(2)简单推导了后方交会的基本原理,同时,也简单阐述了在大跨度施工面上控制点精度复核方案。根据这些基本方法,本文推出了基于全站仪在复杂场景下的精准定位方案。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号