上海工程技术大学 上海 201620
摘要:随着人们对自然环境要求的日益增高,草坪在城市绿化、景观规划、道路绿化、环境保护、生态城市与园林城市建设中都越来越显示出重要的地位,尤其在欧、美等的发达国家草坪业已发展成一大行业,因此带动草坪机械行业的兴起。除草作业是农林种植行业中不可或缺的重要环节,该环节的作业质量会对作物的生长产生直接影响。在植保行业中,随着世界范围内各国现代化的进程逐步推进,公共商业设施与个人居住土地的绿化程度逐渐提升,大量公园草坪、足球场草坪、高尔夫球场草坪等一系列草地场所都需要按时进行草坪修剪工作。在各种草坪维护作业中,以草皮修建工作最为繁重,不仅枯燥,而且重复性强,通常需要消耗大量的人力和物力。良好的养护不但能提升草坪的观赏程度,而且杂草的碎屑还能使土地更加肥沃,有利于草坪的进一步生长。但这类工作劳动强度大,重复性高,依赖人力作业所耗成本非常高。
关键词:智能、除草、机器人、四电机
0引言
据中国国家林业协会统计,我国草坪机械需求以每年40%的速度增长。草坪机械属传统机械工业领域,是一类用于草坪维护、植保、修建、施工的机械,其中草坪割草机为主流产品,占80%以上的市场份额。草坪割草机分为商用草坪割草机和家用草坪割草机两大类,商用草坪割草机主要用于园林、运动场地、机场等大型的公共绿地,一般机械功率大,割草效率高;家用草坪割草机主要用于庭院等小面积草坪的修剪,具有机械功率小,操作灵活等特点。割草是重复且繁重的工作,而传统的草坪机电设备比较落后,一般而言,落后于汽车、机床等产业20年,因此美国等西方国家近年来提出以现代电子技术和只能控制技术改造和提升草坪机械产业的战略,在1997年的OPEI年会上,某些西方发达国家提出以现代电子技术和智能控制技术改造和提升草坪机械产业的战略,提出了智能割草机器人的概念,希望在不久的将来用智能割草机器人取代传统的割草机,将人们从繁杂的割草工作中解脱出来,于是智能割草机器人的研究应运而生。
1壳体
采用4040国标工业铝制框架,拥有质量轻、承载能力高、价格低等优点,其标准化的结构也便于适配需要的的连接件。框架表面进行了氧化处理,使其拥有良好的防水防潮性能。机身内部隔板上预留了孔位来连接框架、控制器与电池等零件,底盘部分采用了不锈钢板制作,防止在工作过程中飞溅的沙石击穿底板导致内部零件受损。为了减少在工作中意外进入雨水、泥土等损坏内部电路的可能性,在与刀片轴与底盘的连接处增加了橡胶垫圈。壳体采用ABS加厚工程塑料,在四个方向共预留了4个红外避障传感器固定孔,以及一个前大灯连接孔。采用螺栓与框架相连接,在接缝处填充了橡胶密封条,相较于直接采用密封胶连接,该连接方式使得后期的维护与调整更为便捷。
设计图如下所示

渲染图如下所示

2动力系统
在动力系统中,车体由四个直流电机带动轮子进行移动,相对与轴传动的动力设计,四轮独立能够又更大的动力和自由度。通过4个24V无刷电机实现后轮驱动,来控制除草机的前进与转向。设计时将电机与减速器合为一体,减轻了驱动系统质量的同时,也为机身内部预留下了更多的空间。在布置电机时考虑了除草机整体的质心位置,将后轴位置选定在了刀片后方以保证工作时的稳定性。轮胎采用实心橡胶材质,能提供足够的摩擦力来在草地上工作,后期维护的成本也相应减少。
3系统控制原理
整机的工作流程为机器视觉技术识别外界环境,然后分析是否有杂草、是否有障碍物。如果有草,识别判断其高度,调节刀具高度,粉碎。粉碎完成或没有杂草就继续行走;如果有草再识别判断。如果遇到障碍物,识别判断其距离,调节方向和速度;如果再遇到障碍物重新识别判断。重复上述过程。
速度传感器:通过感知除草机的运动状态,将运动速度转化为电信号输出,从而控制除草机的行驶速度。速度传感器具有一对红外线发射与接收管可以安装在除草机的底盘上,通过发射管发射并由接收管接受的红外线来测量除草机行驶的距离和时间,进而计算出除草机的行驶速度。速度传感器将速度信号反馈给控制器,控制器根据速度信号和预设的速度值,来控制除草机的电动机,若预设的速度值为每秒0.5米,速度传感器所反馈的速度值大于该预设值,则通过降低电机转速将速度降低至预设值,使其保持稳定的行驶速度。
机器视觉:机器视觉技术在国内外农林生产中有着广泛的应用。目前很多农林机器人都应用图像处理技术来识别农作物,并采用多传感器融合的方式来提高执行的精度和效率。除草机器人的图像处理模块主要用于识别杂草的高度差异和障碍物,将处理后得到的杂草信息和障碍物的距离发送给执行机构,进而使刀具升降机构将刀具调整到合适的高度进行除草作业,调整除草机的行驶方向和速度,从而避免障碍物碰撞和过度割伤草坪。
能量供应系统:采用可再生能源——电能,通过可充电电机作为无人除草机的能量供应系统,优点在于它可以循环使用,不需要频繁更换电池或电源,从而节省了成本和时间,此外,还可以通过调节电源的输出功率来控制电机的转速和扭矩,从而实现速度的控制,以确保其在进行长时间任务时能够持续工作。
电压传感器:在无人除草机的电池上安装一个电压传感器,可以实时监测电池的电压变化。当电压下降到一定程度时,就说明电池电量已经耗尽,需要充电。电压传感器将信号反馈给控制器,控制器根据预设的路线,来控制除草机返回充电站自主充电。
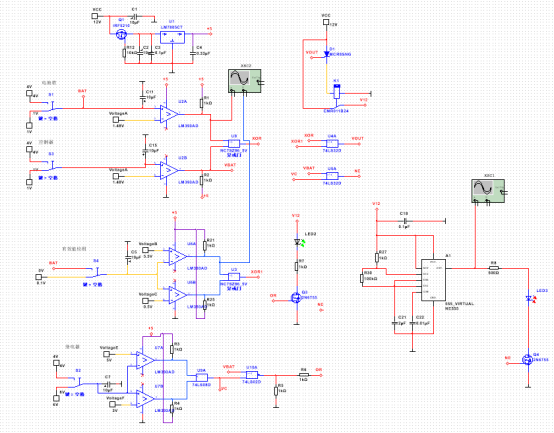
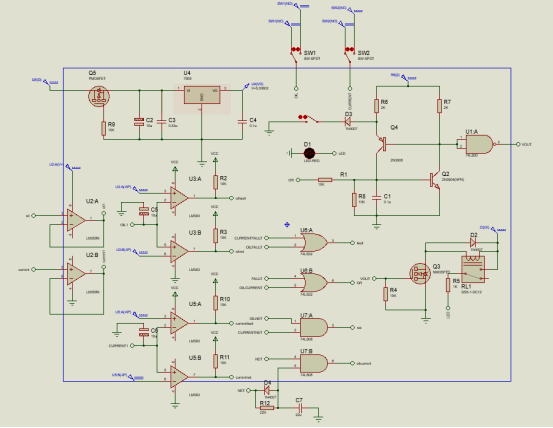
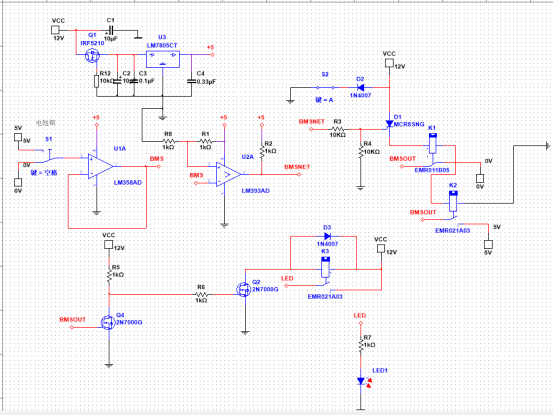
电路仿真如下所示

实物图如下所示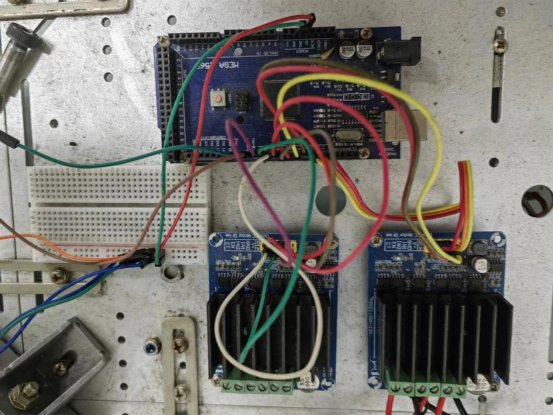
4结论
论文阐述了本产品机械设计由全铝框架拼接而成,采用钛图层刀片已达到最大限度减小噪音。而在动力设计方面采用4轮电机,4个独立的小电机不但达到轻量化的同时保证足够的动力驱动性能。在电路系统方面我们采用电路仿真系统做性能上的设计及优化部分,节约大量成本和人力。同时验证了除草机工作效率的显著,以及高续航耐用性的特点。
参考文献
[1]苏运伟,李东伟,石佳玉,张智林.基于STM32F103芯片的智能除草机[J].电子世界, 2020,(15): 99-100.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



