国核示范电站有限责任公司 山东 威海
摘 要:根据最终安全分析报告第十五章要求,反应堆满功率时发生汽轮机停机,堆功率在五分钟内应降至15%RTP左右。全范围模拟机进行测试时,发现满功率汽轮机停机后,堆功率下降速度较慢,5分钟后的堆功率仍保持在30%RTP以上,与设计要求的15%RTP相差较大。本文通过分析该非预期现象,查找堆功率下降速度较慢的原因,探讨并给出相应的优化方案供设计单位参考,从而避免机组非预期现象的发生,降低潜在的风险。
关键词:堆功率;落棒速度;功率失配偏差
在全范围模拟机测试中,发现反应堆满功率汽轮机停机工况存在堆功率下降速度慢问题。当机组满功率工况下汽轮机停机,在停机90s后落棒速度下降至8step/min,且后续落棒速度也较慢,导致堆功率下降速度慢,未按预期将堆功率降至15%RTP左右。针对此现象对照DCS逻辑组态和设计文件进行研究分析。
1初始事件
机组100%FP,汽轮机发生意外停机。
1.1 预期响应
汽轮机停机后,控制棒根据高功率模式失配偏差以一定的落棒速度下插,堆功率随之下降,停机5分钟后堆功率降至15%RTP。
1.2 实际响应
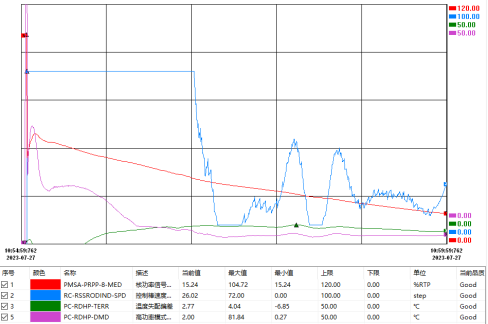
汽轮机停机90s后落棒速度下降至8step/min,且后续落棒速度也较慢,导致堆功率下降速度慢,5分钟后的堆功率仍保持在30%RTP以上。该瞬态工况堆功率、控制棒移动速度、温度失配偏差、高功率模式失配偏差等参数变化如图1所示。
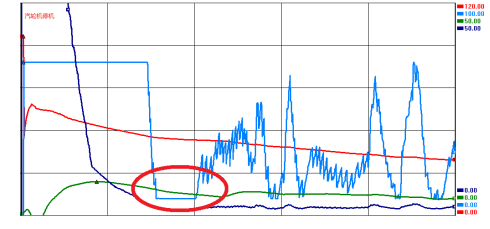
注:红色:反应堆功率;蓝色:棒速;绿色:温度失配偏差;紫色:高功率模式失配偏差
图1 汽轮机停机瞬态堆功率等参数变化趋势
根据图1结果显示,落棒速度受高功率模式失配偏差影响,汽轮机停机90s后落棒速度下降至8step/min,且后续落棒速度也较慢,导致堆功率下降速度慢,5分钟后的堆功率仍保持在30%RTP以上。
2原因分析
根据模拟机仿真及逻辑图纸分析,认为存在如下问题:在汽机功率较低的工况下,DCS非安全级逻辑组态搭建的“功率失配偏差相关逻辑”与设计要求不一致。
2.1 设计要求
根据反应堆控制系统Tavg控制逻辑图,功率失配偏差与温度失配偏差之和影响控制棒的自动控制。

图2 反应堆控制系统Tavg控制逻辑图
功率失配偏差受比例系数KQT的影响,KQT越大则功率失配偏差越小,进而控制棒移动速度就越慢,根据NSSS控制系统整定值清单,KQT与汽机功率成反比,且最大为1/D(D为0.5,所以最大为2),最小为1。
经过非线性增益修正的功率失配信号需经过以下可变增益进行修正:
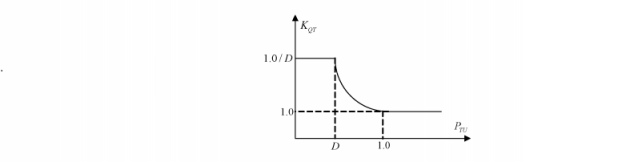
图3 功率失配信号增益修正图
其中:D为汽轮机负荷可变增益拐点:当汽轮机负荷小于D时,增益为1.0/D;当汽轮机负荷大于D时,增益与汽轮机负荷成反比(1.0/PTU)。
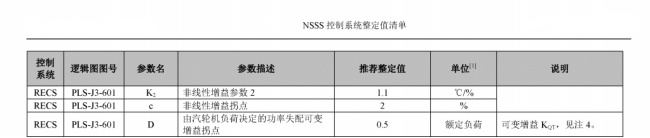
汽轮机停机后,汽轮机甩负荷到20%,小于汽轮机负荷可变增益拐点D,即KQT为1.0/D,根据NSSS控制系统整定值清单,D取值为0.5,所以比例系数KQT最大为2。
2.2 当前控制逻辑
功率失配偏差相关逻辑是在非安全级DCS逻辑组态进行搭建的:
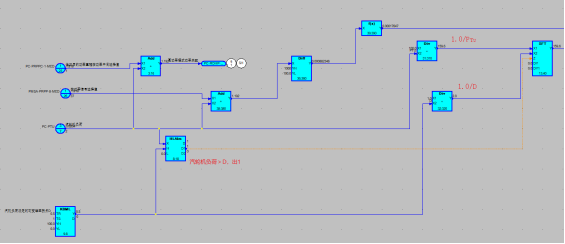
图4 功率失配偏差DCS逻辑图
根据图4,HLAlm为高限报警功能块:当汽轮机负荷大于可变增益拐点D时,输出为1;反之输出为0,SFT为选择跟踪功能块:当Z为1时,输出Y取值X1;当Z为0时,输出Y取值X2。当汽轮机停机时,汽轮机甩负荷到20%后逐渐减小,但是当前DCS逻辑组态中取的汽轮机负荷单位是%,即汽轮机停机后,汽轮机负荷变为20往下降,汽轮机负荷一直大于可变增益拐点D,导致比例系数KQT与汽轮机负荷成反比。
对汽轮机负荷与KQT的对应关系进行测试,所得曲线如下图所示:
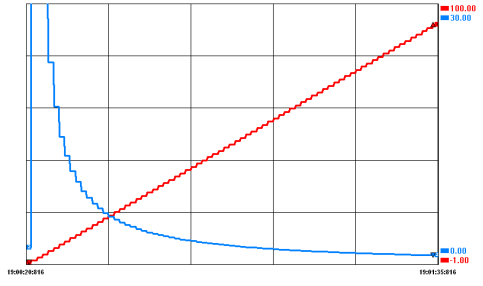
注:红色:汽轮机负荷;蓝色:比例系数KQT
图5 汽轮机负荷与KQT变化趋势
可见KQT最大值达到了200,与汽机负荷的对应关系也与NSSS控制系统整定值清单设计要求不符。KQT最大值比要求值大100倍,使得汽机功率较低的工况下,功率失配偏差比正常值大上百倍,导致控制棒响应与预期不符。
综上,堆功率下降速度比设计要求慢的原因有两点:
1)功率失配偏差DCS逻辑取的汽轮机负荷值不对,使得比例系数KQT所取的输入不对。
2)比例系数KQT没有高限限制,使得输出远大于设计要求最大值2。
3设计优化
针对原因分析,解决汽轮机停机后比例系数KQT过大问题主要有以下两个思路:
1)优化DCS逻辑组态,解决“汽轮机负荷单位取值”问题;
2)优化DCS逻辑组态,解决“比例系数KQT无高限限制”问题。
3.1KQT控制逻辑输入优化试验
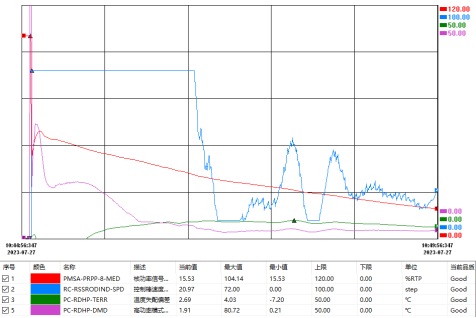
汽轮机负荷输入点经过“÷100”运算后,再与可变增益拐点D作比较。汽轮机停机后,比例系数KQT为2,控制棒落棒速度较快,堆功率在5分钟内下降至15%RTP,结果如图6所示。
注:红色:反应堆功率;蓝色:棒速;绿色:温度失配偏差;紫色:高功率模式失配偏差
图6 优化输入后汽轮机停机测试曲线
3.2KQT控制逻辑输出优化试验
尝试在KQT输出后添加HLLmt功能块,限制输出上限为2,再次进行满功率汽轮机停机测试,堆功率在5分钟内下降至15%RTP,整体响应符合设计预期。结果如图7所示。
注:红色:反应堆功率;蓝色:棒速;绿色:温度失配偏差;紫色:高功率模式失配偏差
图7 优化输出后汽轮机停机测试曲线
4结论
通过分析,认为该瞬态响应未能达到设计预期的主要原因,在于汽机功率较低的工况下,DCS非安全级逻辑组态搭建的“功率失配偏差相关逻辑”与设计要求不一致,导致控制棒下插速度过慢,进而影响了堆功率的下降。
尝试通过优化高功率模式的功率失配偏差控制逻辑(调整汽轮机负荷输入或限制比例系数输出),都可以较好满足停机后堆功率快速下降的要求,使得响应符合设计预期。需要设计院重新评估DCS非安全级逻辑组态搭建的“功率失配偏差相关逻辑”。建议相关设计单位,结合满功率汽轮机停机工况的要求,综合分析考虑,对高功率模式的功率失配偏差控制逻辑进行优化,确保设计目标和要求一致。
参考文献
[1] 孙林宁.AP1000压水堆功率控制模式浅析[J]. 科技资讯,2015, 06.
[2] 毛文礼.浅析AP1000核电站快速降功率和落棒恢复[J].科技视界, 2015, 18.
[3] 反应堆控制系统Tavg控制逻辑图,SNG-PLS-J3-601.
[4] NSSS控制系统整定值清单,SNG-PLS-J7X-709.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



