(1.吉林建筑大学,吉林 长春 130019)
![]()
摘要:肌体表面肌电信号作为一个微弱的生理电信号,近年来,在医疗康复等领域取得了广泛的应用,能够帮助残疾人更好的融入社会生产生活之中。基于表面肌电信号的智能医疗仿生手通过sEMG传感器采集表面肌电信号并对其进行预处理,随后通过小波变换求取期望值使表面肌电信号作为控制源被更为准确的识别,并将其与机械臂控制系数相对应,最终实现达成预期目的的智能医疗仿生手。
关键词:sEMG传感器,表面肌电信号
1 研究目的
手臂是人类日常生产生活不可或缺的必要组成,人类通过手臂来完成生活中的各种不同工作,创造社会财富。一些残疾人因为手臂的缺失而不能进行正常的生产活动,这样使他们难以感受到不同物体的不同状态,使他们难以融入到精细复杂的社会生产工作中。
随着人工智能的发展和社会的进步,对于帮助上肢存在缺陷的残疾人更好的进行生产生活的命题得到了社会的广泛关注,用于残疾人治疗的智能医疗仿生手随之产生。智能医疗仿生手可以更好的帮助上肢存在缺陷的残疾人获得手臂功能的补偿,改善手臂残疾群体的生活。
传统的医疗仿生手只是机械似的通过人工控制来完成对物体的抓取等日常活动,这样即增加了操作的复杂程度,也无法完成一些精密的动作需求。具有采集肌电信号功能的智能医疗仿生手摒弃了传统仿生手的缺点,使残疾人能够对其进行更好的控制,辅助完成一些更为精密的操作,使残疾人能够更好的融入到社会的生产生活之中,故基于肌电信号的智能医疗仿生手成为了解决上肢缺陷残疾人的必然趋势。
表面肌电信号在生物医学和生物机械学等方面具有广泛的应用,人体肌肉的运动主要由大脑进行控制,大脑将命令通过生物电信号的方式传递给肌肉,肌肉随之进行相应的反应动作,完成人脑的指令。对肌电图进行分析,能够做出对各种肌肉相关疾病的诊断。智能医疗仿生手通过采集表面肌电信号来对运动特征进行分析进而做出相应的动作。通过研究可以将仿生手臂的各种控制参数与相应的表面肌电信号相对应,形成一个类似正常手臂的控制系统,可以实现代替正常手臂行使日常生产生活。因此,作为一个可靠的控制源,表面肌电信号被广泛的应用于残疾人康复医疗领域之中,帮助残疾人能够更好的融入日常社会生活之中。
本文所设计系统通过表面肌电传感器模块SEMG和单片微型计算机,来对表面肌电信号进行采集和分析处理,使其能够与机械臂控制参数相对应,从而实现仿生手臂的智能系统控制。
2 实验过程
该智能医疗仿生手的控制系统主要由三个方面组成:信号采集部分、算法处理部分以及控制部分。信号采集部分主要由SEMG传感器来实现对表面肌电信号的信号采集,随后将信号传输给微型处理器,微型处理器对信号进行预处理,将肌电信号与对应的手势动作相分类,最后传达给控制器,使智能仿生手做出相应的动作。如图 1所示。
2.1采集表面肌电信号
人体的重要组成成分为肌肉和骨骼,其中肌肉起到人体构成的难以替代的作用。肌肉通过收缩与放松运动以完成肢体的动作,同时,在人体内部的许多生理运动也依靠这肌肉的存在以维持,肌纤维、神经、血管等组织是肌肉的重要组成部分。在肌肉群中,骨骼肌组织决定了对肌体动作的控制作用,受到大脑的意识支配,当其收到大脑的神经指令时,单个神经元能够支配多个肌纤维组织,这样可以使肢体完成各种复杂的动作。当神经组织由于收到刺激而紧张收缩时,生成了相对应的激动效果,肌细胞存在活性运动,使得电能转化为机械能,导致肌原纤维产生了收缩的结果,肌肉也随之变得收缩。当肌肉进行收缩运动时,电位发生了相应的变化,产生了电位差,最终通过对电位的记载形成肌电图,其信号为肌电信号,该生理电信号通过电位差的形式得以传输,在肌体表面对其进行监测,得到的信号则为表面肌电信号。
表面肌电信号是及其微弱的,其电势始终处在0-5mV之间运动,在采集表面肌电信号中由于信号较为微弱,则会受到一定程度的干扰影响而使采集的结果精准度较差。而且sEMG具有低频特性,人体的sEMG频率一般处在一千赫兹上下,且其频谱则在二十到五百赫兹的范围之内,sEMG的有用信息所在频率在三百赫兹之下,在三百赫兹以上则为噪声信号。结合上述分析采用sEMG传感器对肌电信号进行采集,该传感器由于需要反复移动肌电电极位置且需要反复进行使用,故使用稳定性和可逆性更高的金属氯化银合金电极采集sEMG信号通过Arduino芯片的模拟输入端口,读取所采集到的sEMG,采样频率300Hz。在采集表面肌电信号的过程中,由于存在电位差的原因,采用两个表面电极进行采集较为方便,随之传感器记入数据为两记录电极之间的电压差,测试电极间距一般为2cm,测试信号为众多运动单元动作电位的叠加。
2.2 表面肌电信号的预处理
在采集sEMG的过程中,存在一定程度的噪声干扰,人体内部其他生理信号产生的噪声、表面肌电信号传感器进行工作过程中存在的噪声以及在工作过程中由于四周环境存在的噪声,都将影响对表面肌电信号的采集。为了获得更为精准的表面肌电信号,则在分析处理表面肌电信号之前需要对其进行预处理,以期去除采集过程中的噪声干扰,降低信噪比,使采集到的表面肌电信号更为精准可靠。
在预处理之前由于表面肌电信号较为微弱的特点,需要对采集到的表面肌电信号进行差分放大处理,由于sEMG传感器是由两个电极组成的采集信号输入端,则放大电路应当以AD820为核心组成差分放大电路,该差分放大电路如图 2所示。
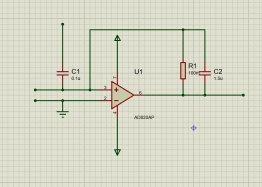
图 2 差分放大电路
在经过放大电路后,由于噪声的干扰是相对于表面肌电信号而确立的,因此除了表面肌电信号这一目的生理信号,其他的非目的生理信号即
为干扰信号,都需要将其进行排除;sEMG传感器由于是由金属构成的,金
属内部在工作过程中存在噪声,它的
噪声通常在上千Hz的频率内波动,属于高频率的噪声信号。由于表面肌电信号与产生噪声的信号存在不同的频率,为了提取有用的sEMG,需要对放大信号进行滤波处理,筛选合适的电信号,使背景噪声对表面肌电信号的干扰降到最低。低通滤波信号如图 3所示。
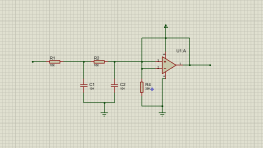
图 3 低通滤波信号电路
采集到的肌电信号经过低通滤波信号处理之后由于MCU只能够处理识别数字信号,将放大滤波之后的信号通过AD转换处理,信号经过处理后即为数字信号,数字信号传输到MCU,最终实现对采集到的肌电信号的分析处理。
MCU主控芯片选用Arduino 328,内部资源丰富,控制系统便于集成小型化。同时具有14路数字输入/输出口(其中6路可作为PWM输出),6路
模拟输入,一个16MHz晶体振荡器,时钟速度最高可达16MHz,包括8KB的SRAM和4KB的EEPROM。Arduino主控电路原理图如图 4所示
![]()

图 4 Arduino主控电路原理图
![]()
2.3表面肌电信号的特征处理
由于表面肌电信号较为复杂,需要用少数的数据信号表示整体的表面肌电信号,加快MCU的运行速度,减少对信号识别的难度,对表面肌电信号进行特征提取,关键在于提取出可区分度强和表示能力强的特征向量。为了能够更加精确的识别出肌体表面的生理肌电信号,需要的特征值必须具有奇异性强,算法简便等特点。
作为一种时频域生理信号,表面肌电信号无法使用单纯的时域信号或者频域信号进行特征提取,随着研究的深入,小波变换的时频域特征提取方法逐渐被应用于对表面肌电信号的特征处理提取之中。与傅里叶变换不同,小波变换对其进行了延深发展,克服了傅里叶变换的诸多不足,能够多尺度的对信号进行系统的分析,在高频段可以对信号进行时域分析,对信号在时域方面进行了细分处理,同时在低频段得到相对应高频段的细化频域分析。这样就解决了单纯的时频域分析无法对表面肌电信号进行特征提取的问题。
3实验分析
小波变换应用于表面肌电信号,通过对于变换结果的各个角度的观察分析,可以得到信号对应的不同的肌体运动。通常通过对变换提取的特征值的绝对均值、均方根以及标准差等角度对相应手势动作进行识别分析。小波分析主要是通过对函数空间L2(R)进行讨论分析。L2(R)是指在R自变量范围之上可积函数的平方最终得到的函数空间,即
 (3-1)
(3-1)
将小波变换得到的结果进行求取均值,这样可以直接看出表面肌电信号的幅值,更为直接的表示出了表面肌电信号。对小波变换得到的结果特征值求取均方根运算,则可以得到表面肌电信号的功率大小,这样可以直观的表示出肌电信号控制手臂进行不同运动的不同特点。特征值的标准差的大小可以反映出sEMG的聚类性,标准差越小则表示肌电信号的聚类性越好,通过对标准差的大小分析进行信号筛选,剔除其多余的部分而最终得到其较好的部分。
将表面肌电信号进行特征提取之后,将其作为控制源构成整个控制系统,发送至智能仿生手模块,对解算后的手臂信息经运动建模后,输出手臂运动的角度信息,发送给机械臂控制旋臂的转动。以表面肌电信号为控制源与机械臂各种控制特征系数相对应构成了智能医疗仿生手。
4 结论
由于表面肌电信号存在电位差,故本实验采用双电极的sEMG传感器对肌肤表面肌电信号进行采集,表面肌电信号较为微弱且外部环境存在噪声,对于采集的sEMG造成了干扰,故采集到的模拟信号需要进行预处理,在预处理阶段将信号进行放大然后进行滤波处理,根据干扰信号与目的信号的频率不同,通过低通滤波得到了去噪的表面肌电信号,随后将其进行AD转换后输入MCU对信号进行处理分析,由于表面肌电信号为时频域信号,故应当对其进行特征提取,已使其识别更为简单,通过小波变换结果取得的特征值对其进行求取绝对均值,均方差,标准差等运算,使得信号具有代表性,得到其较好的部分,将表面肌电信号作为控制源对机械臂的各种控制参数相对应,最终实现期望的智能医疗仿生手的功能。
该智能医疗仿生手能够有助于解决上肢存在缺陷的残疾人拥有正常人类的手臂功能,帮助其更好的融入社会。由于对表面肌电信号的无创采集,也不会对残疾人的日常生活造成困扰;对小波变换形成的特征值的运算分析可以快速精确的辨别出期望的手势动作,并控制机械手做出相应的动作,更好的完成残疾人期望进行的动作。
5 参考文献
[1]孙甲文. 表面肌电信号预处理技术研究[D].哈尔滨理工大学,2013.
[2]梁茜雅,张庆国,杨兴洋,裴延卓,万红强.基于表面肌电信号的机械臂运
动控制[J].南方农机,2022,53(19):161-163.
[3]陈泽斌,郭海漫.基于肌电信号的机器学习应用[J].自动化应用,2022(09):160-162.DOI:10.19769/j.zdhy.2022.09.049.
[4]刘国平. 肌电信号手势识别中的适应性问题研究[D].桂林电子科技大学,2022.DOI:10.27049/d.cnki.ggldc.2022.000980.
[5]杨广映,罗志增.小波变换在肌电信号预处理中的应用[J].杭州电子科技大学学报,2005(01):14-17.DOI:10.13954/j.cnki.hdu.2005.01.004.
[6]焦伟,刘思成,韩博,宫玉琳.基于概率神经网络的多模态感知假肢手[J].长春理工大学学报(自然科学版),2021,44(06):116-124.
[7]李强. 表面肌电信号的运动单位动作电位检测[D].中国科学技术大学,2008.
![]()
[*] 基金项目: 吉林省大学生创新创业训练计划项目,项目编号:S202210191106

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号