内蒙古电力(集团)有限责任公司航检分公司
摘要:为了提高激光雷达扫描数据的自动化处理,对激光雷达扫描过程中的点云数据处理原理进行了总结,对其具体应用进行了分析。应用结果表明:三维激光点云数据具有离散非结构化、海量高冗余、点密度不均匀、局部缺失等特点,如何研究输电通道杆塔、导地线、绝缘子、地面通道、建筑物等关键类别点云突出特征,确定适用于输电通道点云分类的深度学习模型,是提升输电通道点云数据自动分类准确率的基本前提。
关键词:激光雷达;处理分类;应用
0 前言
激光雷达设备采集的原始点云数据是一堆无标签点,没有明确含义,需要进行正确的分类才能支撑上述各种应用,传统的手动分类方法需要安排专人对点云进行判读整理,工作效率低下且容易出错;目前也有部分算法和软件可以利用点云中的特征对特定类别进行提取,但目标物往往比较单一,后处理工作量较大。因此,对激光雷达扫描数据自动化处理分类程序的研究与应用进行分析具有重要的意义。
1 激光雷达扫描数据自动化处理分类技术
点云分类是激光扫描点云应用的关键步骤和基础性工作,也是点云数据自动化处理的核心与难点。目前分类方法较多,当仍处于发展阶段,众多问题需要深入研究。激光雷达扫描数据点云分类主要有两种分类思路。
1.1基于几何特征的传统分类方法
传统的分类方法基于局部邻域点的几何结构,如密度、曲率、粗糙度,开发了各种手工制作的点描述符,选择合适分类器预测点云的语义标签。中国测绘科学研究院的张继贤采用支持向量机(Support Vector Machines, SVM)、中国测绘科学研究院的林祥国采用随机森林(Random Forest, RF)、武汉大学的郭波、黄先锋等人采用JointBoost分类算法对点云数据进行分类处理,这些方法没有充分考虑相邻点云的联系,导致噪声对分类结果的影响很大。而后提出的联系上下文信息的方法,如德国莱布尼兹大学的Niemeyer J等人提出的条件随机场(Conditional Random Field,CRF)、Munoz D和Shapovalov R等采用马尔科夫随机场(Markov Random Field, MRF)进行点云分类。这类传统的激光点云分类方法主要根据分类物体的几何特征为基础来开展点云数据的分类,但是还存在一些问题:一是手工设计规则主要依靠操作人员的专业能力,主观性较强;二是不同的应用场景的约束条件各不相同,导致泛化能力和准确度不理想;三是选择与组合最优分类器的过程复杂度高,浅层模型推广到大型复杂的真实场景中存在难度。四是分类效果受点云数据的密度、点云数据噪声等多种因素干扰,分类准确性严重依赖获取的数据质量。
1.2基于深度学习的点云分类方法
近年来,随着人工智能算法的快速发展,采用深度学习技术对三维点云的分类成为主流研究方向,在大型复杂场景的三维激光点云数据处理方向逐步取得成效。起初研究者们提出将原始点云投影到2D图像中,再将其提供至更深层的网络。但这类方法需要手工构造特征来增强2D特征图像的表示,并且由于3D到2D转换过程中的信息丢失,使得分类性能受到限制。为此学者们开始从三维数据的源头入手,来解决上述方法带来的弊端。2016年, Qi C R等学者首次提出可以直接作用于原始点云的PointNet网络,在点云分类、语义分割及目标检测方面得到推广与应用,直接处理三维原始点云的研究成为热门,该类方法的研究方法也不断更新发展,主要有优化改进多层感知机(Multi-Layer perceptron,MLP)、卷积神经网络(Convolutional Neural Networks,CNN)、图卷积神经网络(Graph Convolution Networks,GCN)以及注意力机制等方法。随着深度学习方法在遥感领域的普及,上述技术在场景分类、目标检测、变化等方面取得显著效果。上述研究表明深度学习的优势在于:一是深度学习能够实现点云特征信息的自动化提取,有效规避传统算法提取点云特征时操作人员的主观因素带来的影响。二是深度学习的分类模型泛化能力强,分类精度高,可以推广应用于输电线路等大型复杂三维场景中。
2 激光雷达扫描数据自动化处理的应用
2.1 激光雷达扫描输电通道中的应用
内蒙航检中心项目团队累计完成1万多公里的220kV以上输电线路的三维激光扫描,拥有大部分典型杆塔线路区段,以及特高压线路及密集通道等线路区段的三维激光点云数据积累;内蒙航检中心是在输电通道三维激光扫描作业和点云数据处理方面的代表,取得了一系列研究及应用成果。其中直升机激光扫描年平均作业量达1万公里,具备完整的三维激光点云数据采集、处理和分析业务链条;在输电通道三维激光点云高精度自动解算方面处于国内领先水平。项目团队在输电通道三维激光点云数据处理方面积累了丰富经验,奠定了扎实基础。
2.2激光扫描点云数据基础分类工具中的应用
内蒙航检中心与数字绿土团队合作开发了基于结构约束的杆塔提取算法,结合杆塔几何结构特征和区域生长思想,实现了多类型杆塔的精准提取;基于不同投影平面的空间分布特性,结合随机采样一致性和欧式聚类算法,提出了导地线自动提取算法,优化了杆塔与导地线连接处的精准分割;提出了基于多条件约束的道路路面提取算法,基于连通域分析,辅以坡度、线性度等约束,保证主体路面的完整性;采用建筑物高差特征和连通域分析相结合的方法,实现了建筑物提取,确保建筑和植被的精确分割。通过以上算法的集成,开发了激光扫描点云分类工具,实现了杆塔、导地线、建筑物的精准识别,识别率优于80%。
2.3激光扫描点云数据质检工具中的应用
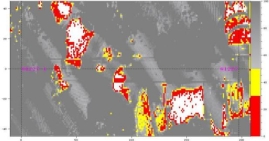
提出了激光点云数据质检方法,构建了基于八叉树空间高效索引的点云组织方法和区域生长算法,实现输电通道点云密度、带宽等质量的快速评估;提出顾及导线-地物间安全间隙特征和分段层次聚类方法,实现了输电线路本体完整性的评估。结合电力应用场景和计算机多核并行计算技术,研发了点云质量检查软件工具,实现了激光扫描点云数据质检从人工向自动质检的转变,工作效率提升60%以上,有效降低了作业机组的工作强度,其中图1为杆塔区域点密度检查,图2为导地线完整性检查。

(a)点密度检查格网划分 (b)点密度显示
图1 杆塔区域点密度检查


(a)导地线与地物关系示意图 (b)导地线缺失检测
图2 导地线完整性检查
2.4输电通道点云数据预处理系统中的应用
通过研发输电通道点云数据智能处理系统,支持一键后处理航迹解算和POS解算,同步生成激光雷达点云数据航迹质量报告和POS精度报告,快速精准提取电力通道内的危险目标信息,并为综合模拟工况下的电力安全运行提供分析预测,可以监测建筑物、植被、交叉跨越等是否符合运行规范、满足安全运行要求。
3 总结
激光雷达扫描数据自动化处理分类程序的应用,突破了传统的单点测量方式,可以快速准确地获取目标地物的三维点云信息,具有速度快、密度高、精度高、非接触、成本低、自动化测量等多种优点。但是,由于点云数据具有海量性、高冗余、多样性、缺失、点密度不均一、非结构化等特点,将三维激光扫描技术应用于输电线路航迹规划、交跨距离测量、杆塔倾斜测量、杆件变形检测等方向,对于机载方式和地面架站方式,均需要对点云数据进行分类、拼接等过程,以提升点云数据的处理效率和检测精度。
参考文献:
[1]师瑞卓,张小俊,孙凌宇,裴香丽.基于单线激光雷达的三维形貌重建方法研究[J].激光与红外,2022,52(02):188-195.
[2]罗云,张富泉.激光雷达扫描技术在堆料体积智能测量中的应用研究[J].科学技术创新,2021(30):1-4.
[3]奚东升,郭建勋,薛飞.基于激光雷达扫描的输电空间三维数据协同方法[J].电子设计工程,2020,28(24):57-60+65.
[4]黄思源,刘利民,董健,傅雄军.车载激光雷达点云数据地面滤波算法综述[J].光电工程,2020,47(12):3-14.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



