摘要:对于平衡重式叉车而言,在具体工作过程中,最容易发生的一个问题,就是侧翻,那么为了根本性的降低侧翻的概率,就要将相应的防侧翻模型预测控制系统设置进来,为叉车提供一个重要的侧向支撑力,这样,就可以根本性杜绝侧翻问题,保证其安全可靠运行。
关键词:平衡重式叉车;防侧翻模型;预测控制
平衡重式叉车转向侧翻机理
对于平衡重式叉车而言,其底盘结构具备一定的特殊性,主要就是前驱后转向,也就是说,实际的车身与整体的前驱动桥属于固连状态,而且与后转向桥之间的连接方式,属于铰接。而且在现实中,叉车在具体形势的过程中,会呈现三点支撑平面,那么车身会以前桥为重心,与后铰接点连接的位置,进行左右摆动。此种摆动主要目的,就是确保叉车在通往一些凹凸不平路段时,可以有效通过。实际的车轮如果发生的侧倾问题,而且离地较大,那么整体车身,不会出现任何的侧翻问题,但是,当整体的叉车高速转动的背景下,或者是驾驶人员由于过度进展,出现了失误操作的问题,那么车身就会实现快速的侧倾,与此同时,在载荷急剧增加的背景下,朝向外侧转移,进而内侧的车轮就会脱离地面,进而导致出现非常严重的侧翻事故。
平衡重式叉车防侧翻执行机构
根据前面的分析,我们可以发现,在具体侧倾的过程中,整体的侧倾轴线处于后铰点连接位置时,不会出现相应的侧翻问题,整体相对稳定,而且在叉车持续性的前倾背景下,就会出现载荷向外侧转移的问题,此时,叉车发生侧翻的概率,就会进一步增加。所以,考虑到这一点,应从车身角度出发,额外增加一个防侧倾的力矩,本文主要的设计体现,就是液压支撑油缸,面对叉车在运行过程中,可能会出现的侧翻问题,此时的油缸会直接给一个支撑力,提供给侧向车身,进而降低侧翻概率。如图一所示,为其安装方式。
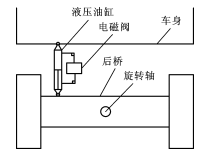
图1 液压支撑油缸安装示意图
叉车在处于一种正常行驶状态过程中,需要特别关注电磁阀,应保持在一种全开状态,此种状态下,相应的油缸,就可以达到完全互通,而且叉车在运行的过程中,最不可避免的就是一些不平整路面,所以,会受到电磁阀节流的作用和影响,进而对活塞运用,起到一定的阻碍作用,那么具体的运动速度,就会进一步减缓,此时,借助缓冲阀,对相应压力进行全面吸收,就可以提高平稳运行概率,与此同时,在具体叉车运行时,如果出现误操作,那么就可以控制具体的电磁阀开度,进而改变油缸的阻尼力,确保叉车可以获得更大的支撑力。
防侧翻控制系统设计
3.1、叉车侧翻评价指标
对于叉车而言,在具体倾侧过程中,车身的侧倾角和横向荷载转移率,可以对整体车身的侧倾程度进行全面的反映,但是,如果叉车通行路面,非常不平坦,那么就会出现一定的误差问题,导致叉车自身的仿形功能受到影响,因此要将零力矩点采用进来,作为评价指标。
3.1.1、评价指标计算
对于零力矩点而言,其主要就是在整体地面上,随意一个可能会变化的点,会让整个车辆系统不同的部位对该点的惯性力矩和重力矩这两者的合力矩最终为零。而且通过零力矩点,可以将车辆实际运行过程中,产生的一些侧倾情况充分反应出来,而且会对整体的侧翻过程中,车辆所处的状态如何,进行精准全面的评价。当然,在对平衡重力叉车的零力矩点进行计算的过程中,可以将叉车的车身,作为重要的联合质心位置代替质点。
3.1.2、评价指标阈值确定
在叉车防侧翻执行机构中,本文将液压支撑油缸选用进来,可以使该车的支撑面,,实现一定程度的扩大,而且将零力矩点作为重要的评价指标,可以将其与整体叉车在倾侧过程中的支撑面,进行对比。根据图2所示,进行进一步分析,如果叉车处于安全行驶的状态,那么ABE为其主要的支撑平面,那么当具体的车身进一步侧倾的过程中,实际的液压油缸锁会将主要的支撑力提供给车身,整体的支撑平面,会进一步扩大为ABGF。所以,在此处进行零力矩点的阈值的设定,就可以将叉车的侧倾分为三个阶段,首先第一个阶段,就是安全行驶阶段;其次第二个阶段,就是危险可控阶段,最后一个阶段,就是临界侧翻阶段。
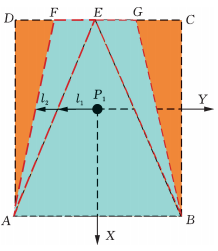
图2 叉车支撑平面
3.2、模型预测控制
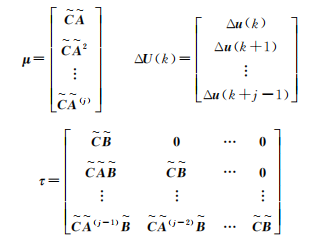
对于模型预测控制而言,主要就是以被控对象为基础,依据进一步建立的线性离散模型,对整体的系统控制量进行全面优化求解,确保整体系统,可以更趋近于目标函数。具体预测模型如下:
在明确模型之后,我们还要掌握相应的约束条件。在具体的模型预测控制之中,不论是具体的控制量,还是实际的系统状态变量,都必须要对叉车自身的物理限制进行全面满足,特别是控制系统,实际输出的控制量如果已经出现了完全超出执行机构执行能力的情况,那么整体的系统就会直接出现失稳问题。
在具体反馈矫正过程中,应明确系统实际运行中的所有累计误差,根据模型预测算法,对整个系统,进行全面的反馈调节,与此同时,要从状态量的角度出发,矫正具体测量值。而且根据前面分析可以明确,不论是控制变量,还是系统状态变量,都可以进行计算,那么通过对状态变量的估算,就可以进一步减小系统误差。
结束语
总而言之,对于平衡重式叉车而言,其广泛应用于多个领域之中,所以,对整体行业发展有着至关重要的作用,但是在该叉车高速运转的过程中,很容易会出现侧方问题,所以,本文针对此,将一种基于零力矩点位置的叉车状态划分方法采取并应用了进来,同时,对侧倾过程中整个叉车的支撑面动态变化进行考虑,就可以详细划分叉车的不同状态,与此同时,将液压支撑油缸作为最重要的执行机构控制系统,以零力矩点为基础,进行模型预测控制的设计,进而对整体油缸的支撑力进行调节和约束,最终达到调整整体叉车行驶状态的目的,最终保证其横向的稳定性,降低侧翻概率,保证安全稳定运行。
参考文献:
[1]张洋,夏光,唐希雯,汪韶杰,孙保群.平衡重式叉车防侧翻可拓分层控制研究[J].中国机械工程,2021,32(22):2705-2715.
[2]夏光,李嘉诚,唐希雯,张洋,陈无畏.平衡重式叉车防侧翻模型预测控制研究[J].中国机械工程,2021,32(08):987-996.
作者简介:
陈艳华,女,汉族,出生年月:1977-7-26,籍贯:河南省安阳市,学历:本科,职务:助理工程师。
史晓勇,男,汉族,1978-11-15,河南安阳市,学历,本科,职务,工程师。
张鸿斌 男 汉族,出生年月 1981-11-8,籍贯: 河南省安阳市人 ,学历:大专 职务储运处助理工程师。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



