(临沂大学机械与车辆工程学院,山东 临沂 276000 )
摘要:本文简要介绍了针对散粮集装箱卸车时遇到的效率低,人力参与程度大的问题,提供了一种机械臂解决方案。本项目通过柔性化机械臂结合Arduino自动控制系统,使机械臂可以具有抓挖、吸粮多种功能,有效避免了粉尘对人工卸车者的危害。
关键词:散粮集装箱;卸粮设备;自动化
设计作品原因
本项目来自某国家粮库集装箱卸粮现状调研后的成果。利用机电自动化减少卸粮过程中的人工劳动力,同时解决人工卸粮过程中的粉尘污染,达到提高工作效率、节省人力、物力的目的。
目前较为常用的机械化卸粮方式有自卸式半挂车、液压翻板、集装箱翻转机、固定式装箱机、移动式集装箱卸箱机、便携式集装箱装箱机、卸箱机等[1]。此类机械的特点为均建立在移动集装箱的基础上,但因为耗时较久且集装箱的型号问题存在效率较低,操作繁琐的缺点。此外,在卸粮的过程中会产生大量的粉尘,既会造成环境污染,也会对工作人员的身体造成危害,长时间接触粮食粉尘会引起呼吸道系统症状、肺功能异常等症状。故我们在考察的过程中留意了这一点,尽量减少人员的直接和间接接触,工人可以在集装箱以外进行卸粮操作,后期还可能实现自动卸粮的措施。因此全自动化卸粮平台发展前景比较广阔。
作品简介
2.1 结构原理
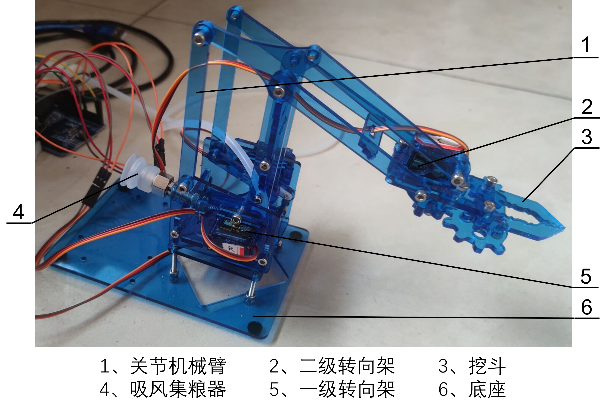
1.关节机械臂2.二级转向架3.挖斗
4.吸风集粮器5.一级转向架6.底座
图 1结构示意图
图 1为结构示意图:由挖斗(3)一、二级转向架(5、2)机械臂(1)组成的工作装置承担卸粮机的主要卸粮任务。机械臂下部,行走式底座(6)配合底部可固定轮组,可进行全方位水平转动,配合升降液压杆以保证吸风集粮器(4)与集装箱底面充分接触,防止粮食遗落。在集装箱内粮食较少后,转动一级转向架,由刮取装置配合吸风集粮器将粮食充分移出集装箱。
2.2 控制系统
该产品模型以arduino来作为控制系统,作为设备的大脑,控制各机构进行精确有序的工作,减小工作误差,使卸粮效率更高。使用机械臂模仿人的手臂的某些动作,将粮食从集装箱中卸下。底部可以全方位旋转,可实现多功能多方位卸车,操作简单,配合上遥控系统,可精确定位。
在总结了机械臂在一般智能化工厂的运用实例后发现,机械臂大多以固定站台的方式安排在流水线的两侧来代替人工进行重复性劳动。此类机械臂的特点是操作重复度高,故其工作的轨迹相对固定。而卸粮机械臂因粮食在装车以及运输颠簸时造成的集装箱内粮食分布的不均;不同集装箱货舱的大小不同;不同粮食颗粒大小的不同,导致其无法按固定的轨迹设计其程序。这里我们选用了可移动式的机械臂底座来进行更加灵活的调整机械臂的位置。在机械臂的实际操控中选用蓝牙遥控设备,以针对卸粮时不同的工况。在程序设计时,加入了机械臂的复位与快速移动功能。方便在卸粮结束后,机械臂的正常退出运行。同时通过对各个不同关节处的马达(舵机),单独编写控制程序,使机械臂整体运行更加灵活,自由度更高。此外,采用机械挖斗与底部吸风集粮器的分离式设计,可以在不同功率的电机供电下同时工作,以减少电力能源的损失,同时有效避免机械臂连续工作可能带来的过载。
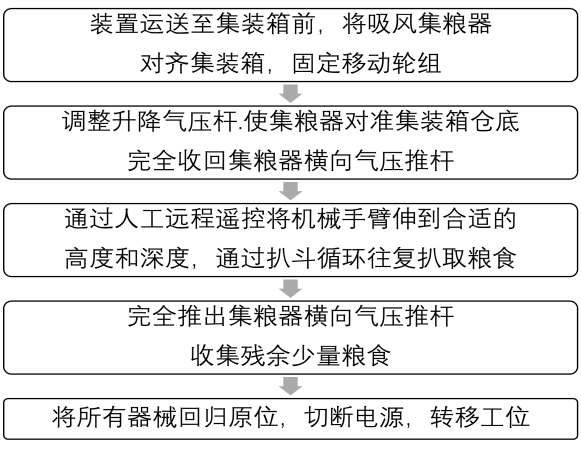
2.3 操作流程
图 2为具体工作流程:将装置运送至集装箱前,调整至合适的高度,方向以及距离。进行抬升,气压支柱进行抬升,进一步调整高度并固定整个装置。将机械手臂伸到合适的高度和深度,以使扒斗可以顺利从集装箱内扒取粮食,扒出的粮食经过漏斗到达传送带,由传送带传入粮仓进行保存,此时完成了一整套完整的挖取过程,机械臂控制系统会校核是否可以进行往复运动,并将本套动作保存记忆,以此完成连续快速的粮食收集。在最后的吸取装置需要再一次进行高度方位调整,来对底部的粮食进行收集,同机械臂一致,吸风集粮器的进给深度也可以进行记忆,人工设定后便可使其可以正常工作。
卸粮机相对于人工卸粮速度快,可24小时不间断,单次运载量大。如果突遇恶劣天气,粮食需要快速入库,人工卸粮的速度不能满足要求,会对粮食造成一定的损失。相对传统的将集装箱使用升降机或吊机直接吊起所需要的大功率起重设备,机械臂仅需较低功率的电机便可实现,从一方面减少了能源的损耗,符合低碳环保的工程设计理念。
设备配有行走限位装置、电器保护装置、对于某些重要防爆区域的电气元器件采用粉尘防爆产品,关键部位也配有检查维修平台。且工作人员操作时会处于安全工作区域,通过远程控制来操作卸粮机,无需进入集装箱内,因此有效防止粉尘对人体造成危害,同时配备上其他除尘措施以减少粉尘外扬以此来对环境的危害降到最小,更大程度的为设备和人员的安全性提供保障。
参考文献
[1]赵瑞营,陈艺,胡方方. 国内散粮集装箱装卸设备应用探讨[J]. 现代食品,2019(04):92-95.
作者简介:
陈亦凡、王浩存、郝梅杰、耿芳书为临沂大学机械与车辆工程学院2019级机制本科学生。徐淑琼为指导教师。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号