佛山市东方医疗设备厂有限公司广东佛山 528000
摘要:伴随人们生活水平的不断提高发展,全世界的电动轮椅消费也从原来的普通电动轮椅逐渐向续航里程高、并且多种功能的电动轮椅升级。本论文设计是采用电动轮椅模块化设计。再根据遥控器操作发出输出信号到控制盒,再由控制盒系统控制整个电气控制系统,从而达到理想状态。
关键词:电动轮椅;模块化;电气控制系
1电动轮椅模型与控制算法
1.1电动轮椅车架结构设计
电动轮椅经过初步构想,再结合分析设计。市场上大多数的电动轮椅车身设计:电动轮椅车身设计最终由车架、工字、扶手、脚踏板、推把手、辅助轮等组成;电动轮椅车身通常采用7003铝合金加工,首先开料,再弯管,再冲切其铝合金,再通过模具焊接而成,而且车架铝合金密度低,而且通过弯管后强度比较高,再通过热处理,其铝合金强度达到优质钢等级,而且塑性比较好,可以弯管比较复杂的形状,铝合金密度小而且比较轻,各种工业品都广泛使用。
我国的7003铝合金在行业中是一种很高强度的铝合金,其性能比6061铝合金的焊接性更好,而且热处理后其硬度会更高,7003铝合金的化学成分都是稀有金属。 7003铝合金已经在我国大用广泛使用,并且使用到航天军工上。
根据市场上价格合理的设计,再通过设计者从细节到安全性出发,设计出对老人或者残疾人需要的电动轮椅,其电动轮椅具备安全行驶、舒适出行、价格低廉等特点,设计者再将电动轮椅进行受力分析,再打样实物测试。电动轮椅车身构分为:车架、工字、支承座、连接杆等。
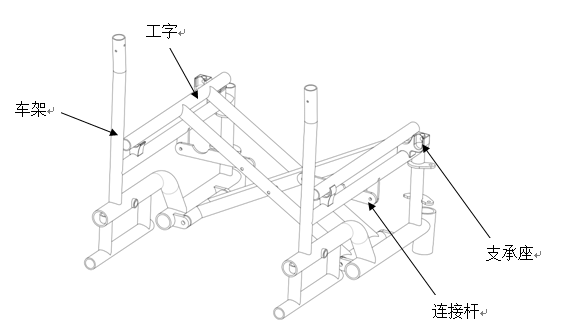
图1结构图组成
模块化量产是电动轮椅必经之路,因为实现模块化可以令企业可以提高生产效率,使企业成本大大降低,甚至可以达到自动化生产。电动轮椅整个控制系统应由车架模块、扶手模块、座背垫模块以及传感器控制模块等构成,每个模块都有自己存在特定的功能,操作者可以根据自己切身需求选择,可以进行定制设计,配制出最合适自己的电动轮椅。同时,企业模块化生产既能降低成本,大大地提高性价比,甚至可以达到自动化生产。随着电动轮椅普遍化生产,各种各样的功能(如智能模式、视角识别、头像处理以及传感技术的发展趋势),电动轮椅的功能将更为完善、丰富,也将真正进入老年人和残障人的生活。
1.2电机的选配
电动轮椅电机分为有刷电机和无刷电机;而本论文设计采用双轮驱动有刷电机,单电机功率≥250W。最大时速能够达到≤6km,爬坡能力能够达到≥8°。电动轮椅制动性能能够符合或高于国家标准并且越障高度能够达到≥80mm。而且该电机具有倒车功能,采用传动轴传动,轮椅无动力的时候可以便于推车行驶,而且电机带有全方位电子刹车系统,绝对能够保证轮椅在半坡停车时能够自动驻车,松开双手时不溜车、轮椅不会倾倒,轮椅驻坡性能≥15°。
1.3电池的选配
轮椅电源采用蓄电池/三元锂电池的混合系统,本轮椅采用三元锂电池,三元锂电的优势在于体积小而且重量比较轻,而且每1个电芯有2600毫安的容量,而且放电和使用时间比较长。由于三元锂电池使用时的电流放电能力比较强,而且功率密度很高,在相同重量的混合电源比普通蓄电池续驶里程要高一倍,而且大大缩短了充电时间缩短一半。本论文的设计采用三元锂电池DC24V 15AH 1个,正常工作电流2-3A,经过里程测试可达到22公里续航。
2电动轮椅控制系统设计
2.1控制系统设计与说明
电动轮椅采用先进的电子刹车系统,只要一松手电动轮椅即停,操作者无论在何路况停车都不会出现异常移动或者偏离,绝对保证使用者安全。当电动轮椅
意电子刹车启动后会消耗部分电量,长时间开启会降低轮椅续航里程,建议用
在不使用电动轮椅的情况下关闭控制器,减少电量消耗。
制器是电动轮椅实现功能的核心部件。平稳的、全方向的运动学性能是电动轮椅的基本性能,驱动电机的控制主要采用脉宽调制(PWM)技术,简单的说即是将电池电压(前行时24v~12v,后退时-18~-12v)按不同的控制要求分配到电机上,电压高时速度快,当左右轮电机输入相同的电压和时,左右电机速度相同,轮椅直线前行或后退;当左右轮电机输入电压不一时,左右轮产生速度差,轮椅实现转向。同时,控制器还要控制好电池/超级电容混合电源的能源分配调控线路图如图2所示。
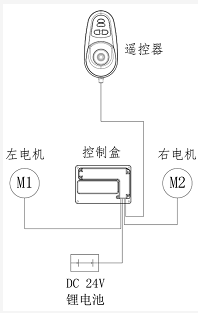
图2电动轮椅线路图
3电动轮椅受力分析
3.1电动轮椅耐疲劳测试
根据电动轮椅产品给人类综合使用性能要求,电动轮椅整车以及各个零部件都应具备一定寿命及耐疲劳能力。现在根据电动轮椅结构和特点,并参考国家标准进行耐疲劳综合测试方法及标准要求:
将负载有75kg重物或者假人的轮椅安装于专用测试耐疲劳试验机上,其测试机上的凸轮通过安装在其测试机上偏心轮高为20mm,而且两个轮偏心位置以及相位及异相位180度,其通电后,两个轮不停转动,将轮椅运转500000次后,再停机检查轮椅各零部件,没有断裂,没有明显的变形、脱焊等异常现象,而且还可以行走并能正常行驶。
总结
本系统的设计是电动轮椅从整体架构的构建,再通过模块化设计,结合企业尽大可能自动化生产,再通过传感器互相传递信息,再把信息发送到控制盒,从而控制系统的控制整台电动轮椅,最后通过受力分析从而实现电动轮椅的稳定性。
以下几点是本系统设计达到目标与所存在的不足:
(1)对电动轮椅进行车身设计,根据市场定位和客户需要设计结构。
(2)对电动轮椅控制系统出发进行分析,分析系统的控制性能和稳定性。
(3)利用计算机进行仿真,演视电动轮椅进行疲劳测试和破坏性测试。
参考文献
[1]原魁. 智能轮椅的研究现状与趋势[J]. 中国医疗器械信息, 2009(01):11-11.
[2]何清华 黄素平 黄志雄. 智能轮椅的研究现状和发展趋势[J]. 机器人技术与应用, 2003(02):12-16.
[3]彭莉 林丽. 基于人机系统适配理念的人体模板的设计[J]. 贵州工业大学学报(自然科学版), 2001(04):12-17.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



