哈尔滨理工大学 测控技术与通信工程学院,黑龙江 哈尔滨 150080
摘要:本文利用Simulink对传统PID控制、模糊PID控制、及自抗扰ADRC跟踪方法的电机转速控制效果进行对比研究,通过参数整定,优化了各种控制方法的控制效果,对比发现模糊PID控制方法可以有效提高系统动态响应能力并适应控制对象本身电参量变化。
关键词: 转速控制 模糊PID 参数整定
引言:在无人驾驶汽车技术发展过程中,轮胎电机由当前转速趋近算法输出理想转速的响应时间是车辆评价时十分重要的一项指标,它将直接影响车辆后续的轨迹规划与行车安全,因此响应快速且稳定的电机转速控制策略非常重要。
1、基于三种控制方式的控制原理
1.1 传统PID控制器控制原理
传统PID控制器凭借其高可靠性、高稳态性及结构简单等优点,广泛应用于工业控制领域。由于电机运动所产生的速度噪声很大,为了兼顾速度控制的准确性和快速性[1],可以选择使用PI控制完成对电机目标转速的跟踪。
PI控制的传递函数可以表示为:
![]()
其中,![]() 为被控对象测量值与目标值的差值,
为被控对象测量值与目标值的差值,![]() 为积分时间常数。通过将电机实际转速及目标转速之差作为输入值输入完成参数整定后的PI反馈控制回路,便可实现对于基本线性的直流电机系统的控制。参数整定是PID控制系统设计的核心内容,利用衰减曲线法对系统的比例及积分系数进行整定:设定电机目标转速及初始转速,仅将PID控制器的比例单元接入控制系统,调节KP使得前两个波峰的衰减比例为4:1,并依据相关经验公式进行计算,波形示意图及经验计算法如图1所示。
为积分时间常数。通过将电机实际转速及目标转速之差作为输入值输入完成参数整定后的PI反馈控制回路,便可实现对于基本线性的直流电机系统的控制。参数整定是PID控制系统设计的核心内容,利用衰减曲线法对系统的比例及积分系数进行整定:设定电机目标转速及初始转速,仅将PID控制器的比例单元接入控制系统,调节KP使得前两个波峰的衰减比例为4:1,并依据相关经验公式进行计算,波形示意图及经验计算法如图1所示。
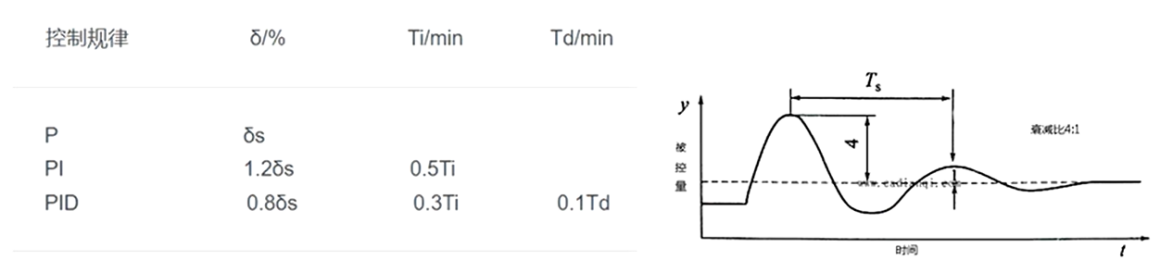
图1:衰减曲线法波形示意图
1.2 模糊PID控制器控制原理
在控制过程中,被控对象模型参数的变化往往会对PID控制效果产生较大影响,当电机误差出现较大变化时,传统PID控制的调节时间会比较长,甚至可能失效。为解决这一问题,在PI控制的基础上,加入模糊控制理论,利用模糊推理实现PI控制参数的在线自整定,分别在速度误差e及其变化率ec的模糊论域[-1,1]上定义3个模糊子集,并假设其隶属度函数服从高斯分布:[负(N),零(Z),正(P)],定义KP的基本论域为[20,40],KI的基本论域为[430,570],同样在其模糊论域[-1,1]上定义了[低(L),均(A),高(H)]3个模糊子集。
在此方法中,PI参数的整定原则如下:针对参数![]() ,系统响应较大(
,系统响应较大(![]() )时,尽量增大比例系数的值,定义
)时,尽量增大比例系数的值,定义![]() ;系统响应较小(
;系统响应较小(![]() )时,则尽量减小其值(
)时,则尽量减小其值(![]() );当
);当![]() 时,分两种情况讨论:
时,分两种情况讨论:![]() 时,定义
时,定义![]() ,
,![]() 时,定义
时,定义![]() 。针对参数
。针对参数![]() ,采用积分分离方法,当误差
,采用积分分离方法,当误差![]() 在
在![]() 附近时,定义
附近时,定义![]() ,否则令其值为
,否则令其值为![]() 。
。
1.3 自抗扰ADRC跟踪方法的控制原理
ADRC控制器由3个部分组成:非线性微分跟踪器(Tracking Differentiator, TD)、扩张观测器(Extend-ed State Observer,ESO) 及非线性误差反馈控制律(Nonlinear State Error Feedback Control Low, NLSEF)。其中,TD的作用是提取信号的微分值并为给定信号设置过渡过程; ESO用于观测状态变量及其各阶导数的估计值,同时对系统扰动进行估计并加以补偿;而 NLSEF则是将前两者的输出进行非线性组合,结合扰动补偿一同构成系统的控制量。
使用一阶ADRC系统对电机转速进行控制,其3个组成部分可分别由以下公式进行描述:
TD:
![]()
ESO:
NLSEF:
式中,![]() 均为误差信号;
均为误差信号;![]() 是TD的输入信号;
是TD的输入信号;![]() 是
是![]() 的跟踪信号;
的跟踪信号;![]() 是速度因子;
是速度因子;![]() 是被控对象的输出信号;
是被控对象的输出信号;![]() 是
是![]() 的跟踪信号;
的跟踪信号;![]() 是扰动观测值;
是扰动观测值;![]() 均为跟踪因子;
均为跟踪因子;![]() 均为滤波因子;
均为滤波因子;![]() 是ESO输出误差的矫正增益;
是ESO输出误差的矫正增益;![]() 为补偿因子而
为补偿因子而![]() 为调节器增益。
为调节器增益。
![]() 作为最优控制函数,其表达式如下:
作为最优控制函数,其表达式如下:
依据经验值及不断调试对以上参数展开优化,便可得到较为理想的速度跟踪结果。
2、simulink仿真验证
2.1 直流电机
为了更加便利地对直流电机的更多参数进行整定,本文未使用Simulink内部自带的直流电机模型,而是利用直流电机服从的机械和电气方程进行电机自主搭建,机械和电气方程公式如公式(6)、(7)所示:
![]()
![]()
直流电机的封装结构如图2所示:
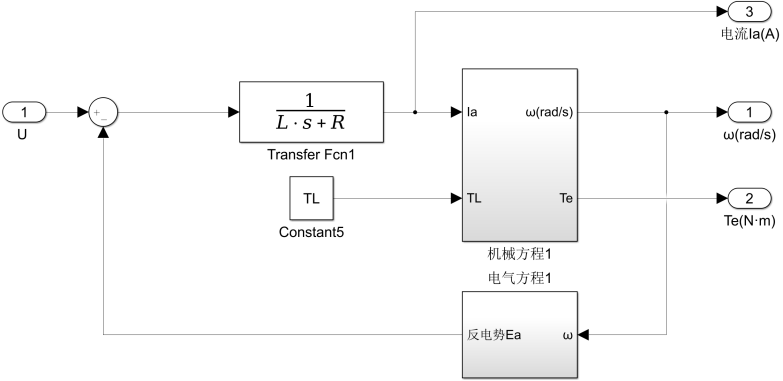
图2:直流电机结构图
2.2 三种控制系统
基于前文对三种控制方式控制原理及理论公式的介绍,可以在Matlab平台下的Simulink中对三种控制系统进行构建,构建过程如下:
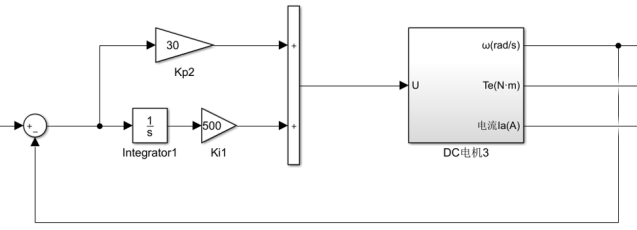
(a)传统PID闭环控制系统实现
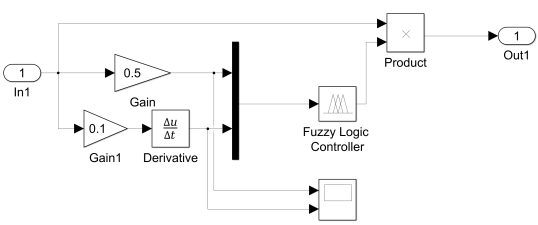
(b)模糊PID模糊整定规则实现
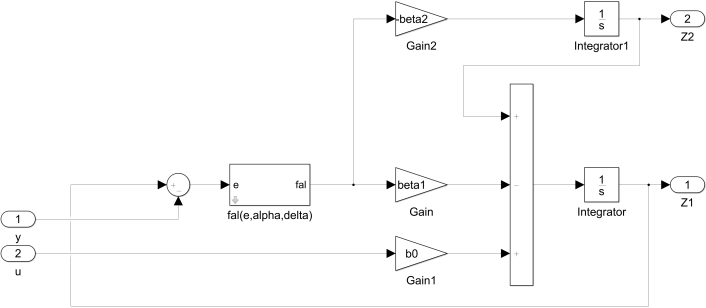
(c)自抗扰ADRC控制扩张观测器实现
图3:三种控制系统核心部分实现
2.3 仿真结果比对
将三种控制策略下的电机转速、转矩与电流![]() 进行对比输出,可以直观感受三种控制方式下直流电机转速跟踪效果的优劣差异,设置随机数作为直流电机目标速度输入三组控制系统,分别将三组控制系统中电机的输出信号引出,并利用示波器进行波形的对比观察,对照系统的整体搭建与转速、转矩波形图结果如图4所示:
进行对比输出,可以直观感受三种控制方式下直流电机转速跟踪效果的优劣差异,设置随机数作为直流电机目标速度输入三组控制系统,分别将三组控制系统中电机的输出信号引出,并利用示波器进行波形的对比观察,对照系统的整体搭建与转速、转矩波形图结果如图4所示:
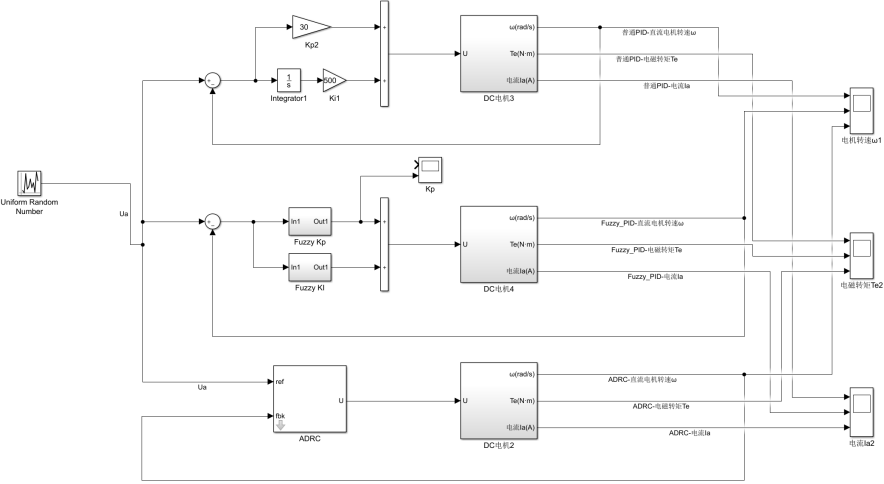
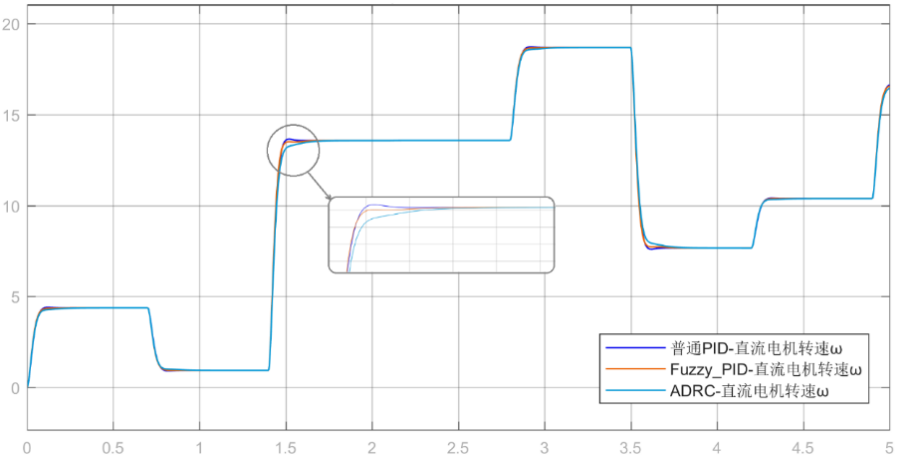
图4:对照系统的整体构建与电机输出参数波形图
3、结论
本文通过三种控制方式对比研究,最终发现对于单工况下的直流电机速度跟踪模型而言,模糊PID控制的响应时间最快,超调量最小,这种优势在目标速度与理想速度差距较大的阶跃转变过程中表现地尤为明显;而自抗扰ADRC控制方法在稳态速度的跟踪效果上更加接近理想值;相较之下,传统PID控制策略则略逊一筹。为了得到更好的控制效果,可以进一步尝试将自抗扰与模糊PID两种控制方式进行结合。
参考文献:
[1]李君臣. 四轮独立驱动无人驾驶电动车辆轨迹跟踪策略研究[D].大连理工大学,2018.
[2]廖自力,赵其进,刘春光.基于自抗扰技术的PMSM无位置传感器优化控制[J].微电机,2018,51(07).
[3] 李刚.线控四轮独立驱动轮毂电机电动汽车稳定性与节能控制研究[D].吉林大学,2013.
[4] Hiroaki Kataoka,Hideo Sado,Ichiro Sakai,Yoichi Hori. Optimal slip ratio estimator for traction control system of electric vehicle based on fuzzy inference[J]. Electrical Engineering in Japan,2001,135(3).
[5] Mizuki Nakahara,Yuki Kawaguchi,Kimihisa Furukawa,Mitsuhiro Kadota,Yuichi Mabuchi,Akihiko Kanoda. Development of a Control Method for LLC Converter Utilized for Input-Parallel-Output-Series Inverter System with Solid-State Transformers[J]. IEEJ Journal of Industry Applications,2019,8(4).
[6] 余卓平,曾德全,熊璐,张培志.基于激光雷达的无人车路面附着系数估计[J].华中科技大学学报(自然科学版),2019,47(07):124-127.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号