海电科智能系统股份有限公司 上海 200063
摘要:历史建筑代表历史的符号,由于历史的变迁造成不可逆的破坏,历史建筑的保护过程由于缺乏资料,这使得历史建筑保护工作困难重重。本文针对目前历史建筑保护中信息缺失、信息共享性差等问题,结合现代数字化技术在历史建筑保护中的优势,提出一种基于点云数据的历史建筑BIM模型重建方法,实现基于点云数据建立BIM模型表达历史建筑数字化信息。
关键字:三维激光扫描、点云数据、BIM
0 引言
历史建筑是一个国家、一个民族历史文化的载体,是劳动人民勤劳与智慧的结晶。然而,在历史文化长河中,一些历史建筑由于人为因素(战乱、政治、 有意破坏等)和自然因素(侵蚀、风化等),造成了历史建筑不可逆转的破坏。在对历史建筑重建、修缮及保护的过程中,又由于图纸的缺实以及传统测绘方式所绘制的二维图纸的局限性,很难满足施工方的要求。本文利用三维激光扫描技术获取历史建筑的外部点云数据,对点云数据进行预处理后,利用REVIT软件创建历史建筑BIM模型,通过基于点云数据的历史建筑BIM模型重建方法,实现对历史建筑模型和信息的数字化存档,可以永久的保存历史建筑的基本信息,为以后历史建筑的保护、修缮及历史建筑遭到破坏后重建提供数据支持,也为今后类似项目提供参考。
1 三维激光扫描技术与BIM技术的结合
将三维激光扫描技术[1]的即时数据采集与 BIM技术[2]在三维可视化方面的优势相结合,能为工程项目建设提供一种新的可能。在目前的工程实际中,这两种技术可视化的交互方式以及上下级平台的沟通方式,在以下方面有着重要的发展空间[3]:
1)资料存档。通过三维激光扫描技术实时采集施工现场的真实数据,特定构件或关键部位的信息采集应准确、客观、完整,并以电子文档形式加以保存。
2)质量检测。采集施工周期中各时期的点云数据,并与已建立的 BIM 模型进行参数对比。相较于传统全站仪等测量检测手段,该方法具有高效便捷、适用性广、得到的数据准确等特点。
3)逆向建模。在图纸缺失或既有建筑的改扩建工程中,通过扫描既有建筑获得建筑各参数数据,再逆向建立 BIM 模型,常用于古建筑加固保护等领域。
4)施工模拟。在对钢结构等大型预制构件进行施工前,可采用构件数据建模的方式进行模拟施工,以辅助解决实际施工中存在的问题。
5)辅助施工量统计。BIM 模型中各构件都可被赋予参数和属性,支持对模型各组成部分的分离和整合,常用于统计材料用量、建筑施工量等。
2 数据采集与处理
2.1三维扫描技术的数据采集
对于历史建筑的数据采集选用地面三维激光扫描仪和无人机摄像相结合的方式,对建筑物的不同角度及内外部结构进行测量。本文案例选用地面三维扫描激光扫描仪对建筑物进行测量描述,选择测量站位置后,根据实际扫描操作将脚架提升到适当高度,打开电源,扫描器开始预热自检,打开 RISCAN PRO 控制软件,创建与扫描仪的连接,扫描过程一般分为四个阶段:粗扫描、精扫描、精扫描目标和照片采集,建议扫描作业设置八个测站点,测站点布设如下图 1 所示。精扫角度分辨率设置为 0.015,在扫描过程中,手持数码相机采集照片,通过 RISCAN PRO 控制软件,最终得到三维坐标点云数据。
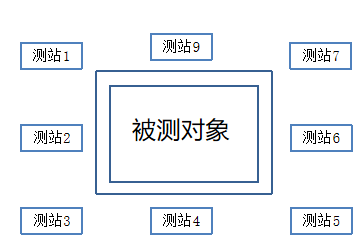
图1 扫描测站点布设示意图
2.2 点云数据的预处理
由于观测仪器设备的自身精度等内因以及在扫描过程中不可避免地会受自然风、振动等外因影响,扫描场地周围与目标建筑无关的物体也可能会被仪器采集,因此点云数据中必然存在噪声点、失真点和冗余数据。本文案例采用均值滤波和高斯滤波两种方法,运用RISCAN PRO控制软件进行点云数据预处理,数据处理流程图如下图2 所示。
图 2 点云数据处理流程图
2.3 点云数据的配置与精简[4]
由于点云数据由多个测站扫描采集,属于多视点云数据,且不同测站获取的点云数据的坐标系相互独立,因此两两相邻测站在扫描目标时需设定扫描的重叠部分,并在扫描重叠处选取标靶点(不少于3个),布设靶标作为拼接的依据。对多视点云数据进行坐标统一,可通过软件对处理过的点云数据进行多视对齐。
其配准原理为:
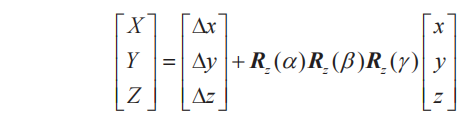
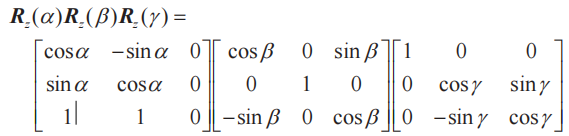
式中,(X,Y,Z) 为点云配准处理后统一坐标系下的坐标;(x,y,z)为扫描获得的初始点云坐标;Δx、Δy、Δz 分别为沿 X、Y、Z 轴平行正方向的平移量;α、β、γ 分别为以 X、Y、Z 轴正方向为轴的旋转量。
点云数据的配准工作是在 RISCAN PRO 控制软件中进行的。首先利用相对方式配准,利用两测站之间的四对同名标靶进行配准,然后再利用RISCAN PRO控制软件中基于ICP算法的Multi Station Adjustment功能对相邻2个测站进行自动精确配准。配准后标准差为 0.0044 m,满足历史筑测绘要求。 配准后的点云效果如图3所示。
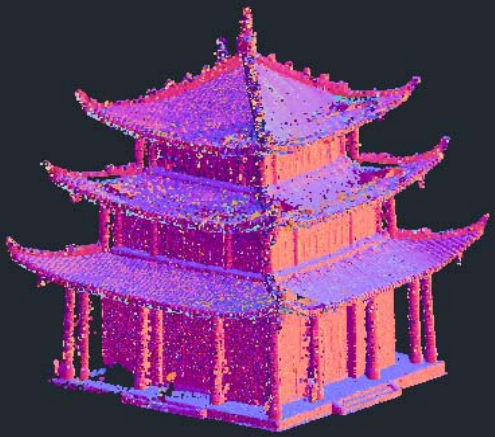
图3 完整点云效果图
3 BIM技术用于历史建筑三维建模
BIM 三维模型是在 BIM 软件 Revit 中进行构建的[5]。基于在Revit软件中链接处理后的点云数据,参照原图对目标建筑的梁、板、柱、墙体、门窗的位置进行绘制。预先设立族库,族作为BIM模型中的基本图元包含了丰富的信息,以墙体的族为例,墙体可按照其属性分为类型和功能两大类,分别包含墙体组成、厚度、功能等子项。在模型绘制前,通过创建不同种类的族,直接放置在对应的位置上。当属性结构不同时,可先修改族中结构物的尺寸材质组成等信息,再利用上述途径创建模型。逆向建模流程如图4所示。
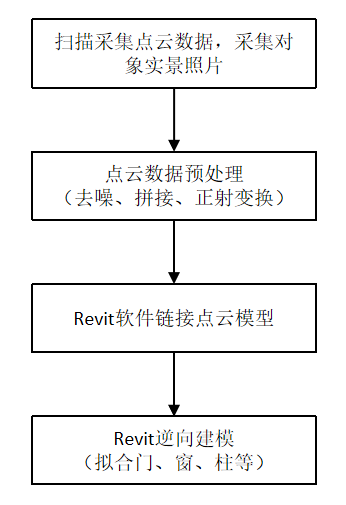
图4 逆向建模技术路线图
4 建筑物模型精度分析
在对点云模型进行拟合、逆向建立 BIM 模型后,需对已建立的模型精度进行分析。 本文案例采用的精度分析方式为:在各测站点上架设全站仪,选取离测站最近的窗台上右侧拐点作为特征点,将测量测站与特征点之间的距离与从模型中提取的10 组数据的相对距离进行分析比对,得到客观的精度评价。精度分析结果如表1所示,可以看出,最小的距离差值为1mm,最大的距离差值为 12 mm,通过计算得到特征点距离的中误差为δ=±6.453 mm,可见通过点云数据进行逆向建模建立的 BIM 模型具有不错的精度。
表1 BIM模型精度对比分析表 | |||
特征点 | 全站仪测距 | 三维测距 | Δs=s1-s2/mm |
A1-A2 | 8.096 | 8.094 | 2 |
B1-B2 | 8.001 | 7.992 | 9 |
C1-C2 | 6.381 | 6.392 | -11 |
D1-D2 | 5.274 | 5.273 | 1 |
E1-E2 | 4.891 | 4.892 | -1 |
F1-F2 | 8.613 | 8.610 | 3 |
G1-G2 | 9.855 | 9.861 | -6 |
H1-H2 | 8.081 | 8.080 | 1 |
I1-I2 | 7.789 | 7.801 | -12 |
J1-J2 | 5.321 | 5.320 | 1 |
5 结论
在经济高速腾飞的现代社会,对历史建筑进行改造升级顺应了时代的发展要求。三维扫描技术和BIM技术之间相结合是一种全新的历史建筑信息数字化的方法。三维扫描技术可以快速精确地采集历史建筑的几何信息,快速得到历史建筑的点云数据,具有减少了传统测量工作量,所得数据的精准度较高,实用性强等优点。所得点云数据建立BIM模型,可以记录并管理建筑信息,为将来历史建筑的修复保存了最原始的数据。作为一种新兴的辅助工程建设方式,其在历史建筑保护中具有广阔的应用前景,值得在今后的工程实际中推广。
参考文献:
[1]祁春辉. 浅谈三维激光扫描技术与BIM 技术在工程测量中的应用[J]. 中小企业管理与科技(中旬刊), 2017(12):176-177
[2]李亭亭, 吴献, 尹莉, 等. BIM技术在工程建设项目中的应用研究[J]. 土木建筑工程信息技术, 2014, 6(1):92-96
[3]王岩, 刘茂华, 由迎春. 三维激光点云数据在建筑物BIM构建中的研究与应用[J]. 测绘通报, 2016(增刊 2):224-226
[4]李刚, 贾海明, 王士杰旧建筑的改造与更新[J]. 应用能源技术, 2008(4): 14-15.
[5]王茹,朱旭,黄鑫.基于Revit的古建筑构件信息模型研究[J].图学学报,2016,37(6):822-825.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



