天津博迈科海洋工程有限公司 天津市 300457
摘要:为了降低海洋钻井电动绞车补偿系统的能耗、实现升沉补偿运动与自动送钻运动的解耦控制,开展了补偿绞车的节能方法及控制策略研究。针对系统大惯性、大负载的特点,提出一种基于混合动力与液压能量回收的新型液压绞车补偿系统,通过被动液压马达承担钻柱的部分静载荷,通过液压二次调节元件克服运动过程中的其余载荷,同时利用液压蓄能器实现对系统位能与动能的周期性回收与再利用。
关键词:海洋浮式;钻井平台;绞车升沉;补偿系统设计
引言
随着陆上石油资源的日渐枯竭,浅海石油开发也接近饱和,资源开发向深海进军已成必然趋势,提高国内海洋技术装备研发水平已是当务之急。在海洋浮式钻井平台上就需要配备一套升沉补偿装置,用以减小平台升沉运动对钻井作业的不利影响。这种升沉补偿系统是集机、电、气、液、自动控制、智能检测为一体的复杂装备,具有高技术、高投入、高风险等特点。国外升沉补偿技术起步早,且长期以来一直垄断着该项技术。而随着深海石油开发的深入进行,特别是在中国南海,升沉补偿系统的需求量会大幅度增加。因此,研发具有中国自主知识产权的升沉补偿装备,具有重要的经济意义和战略意义。
1.绞车补偿的原理
在绞车补偿控制系统中, 绞车传动轴编码器及 升沉加速度传感器分别将游车相对位置以及船体的 升沉运动状态数据及时发送到可编程控制器(或工业计算机),控制器通过计算得到海底钻头相对井底 由于平台升沉形成的绝对位置偏差,同时载荷传感 器将钩载信息也发送给控制器,上述数据经过控制 器处理后输出控制信号控制绞车电机的转速及转向,最终控制主动补偿绞车的提升和下放 ,达到主动 升沉补偿的作用,本系统原理如图 1 。
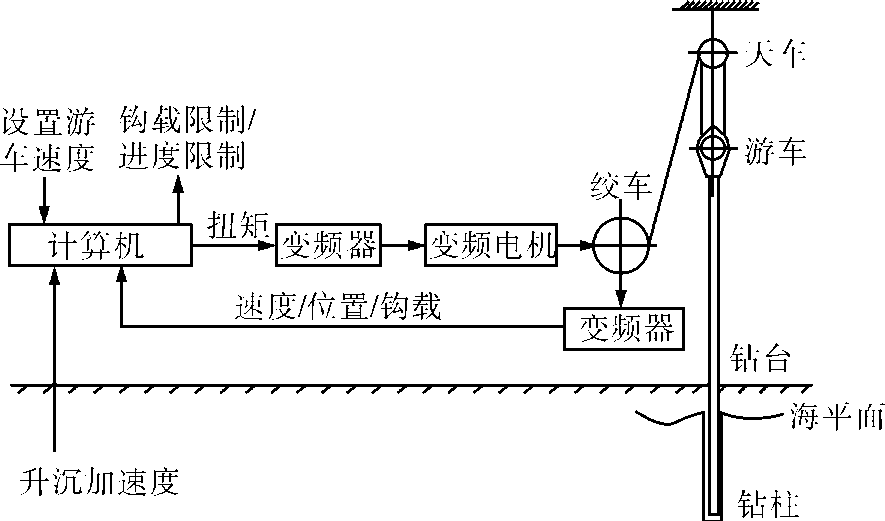
图 1 主动补偿绞车控制原理
游车位置/速度是靠传动轴编码器脉冲的累 加来确定,升沉运动加速度传感器可安装在司钻 室内(也可安装在平台), 用于测量船体在风浪中 的竖直运动信息。此外,本控制系统还可集成电 子防碰系统,即:通过监测游车位置及运动速度,并根据系统的刹车系统力学模型(与刹车能力 、钩载 、游车位置和速度等有关)计算得到游车的理论 刹车距离,通过该理论刹车距离与游在本位置 上可获得的实际刹车距离进行比较,如果司钻输 入的绞车速度使理论刹车距离超过了可获得刹车距离 ,本控制系统会停止执行该命令,以避免游车 与井架和钻台的碰撞,提高作业安全性 ;另外,控制系统可确保在下放钻杆时,避免钢丝绳的松弛,防止损坏钻杆及钻具。主动补偿绞车控制系统应采用闭环的 PID 控制技术,图 2 为控制系统流程。PID 控制中,P(比 例)控制的反应快,稳定性好,是定值控制系统中最 基本的控制作用;I(积分)控制帮助消除系统的余差;D(微分)对动态响应进行及早补偿。本系统设置了转速和电流 2 个调节器,把转速调节器的输出作为电流调节器的输入,再利用电流调节器的输出控制变频器装置,最终控制了绞车的转速,其中电流调节器作为内环,转速调节器为外环,进而获得较好 的静 、动态性能 。
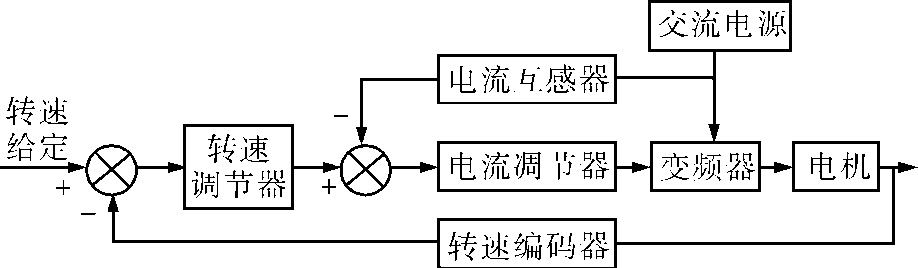
图 2 控制系统流程
2.半主动式绞车升沉补偿系统设计
2.1补偿绞车结构设计
半主动钻井绞车升沉补偿装置(图2)采用差动行星轮系作为升沉补偿绞车的传动机构,主动补偿电机与被动补偿液压马达的动力由外齿圈输入,送钻电机的动力由太阳轮输入,行星架输出动力驱动绞车滚筒运动。PLC控制单元基于检测到的平台升沉信号控制主动补偿电机带动差动轮系外齿圈转动,并通过驱动滚筒正、反向转动来补偿平台的升沉运动,同时基于检测到的钻压变化信号,控制送钻电机驱动太阳轮转动,实现自动送钻运动。蓄能器(气液转换器)通过被动补偿液压马达承担钻柱的部分静载荷。主动补偿电机克服运动补偿过程中的其余载荷,降低了系统能耗、提高了补偿精度。新型钻井补偿绞车主要设计参数如表1所示。
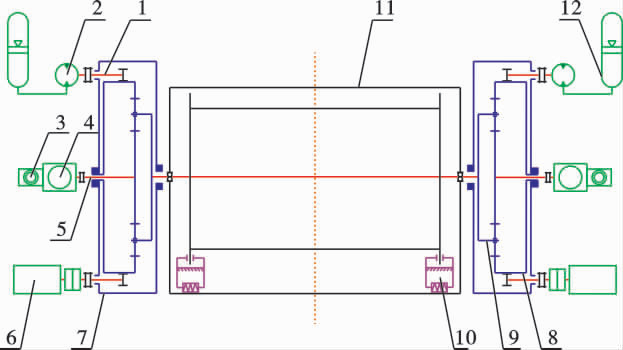
1—外齿圈动力输入轴;2—被动补偿液压马达;3—送钻电机;4—摆线减速机;5—太阳轮动力输入轴;6—主动补偿电机及变频驱动系统;7—差动行星减速器;8—外齿圈;9—行星架;10—液压盘刹;11—绞车轴及滚筒;12—蓄能器。
图2 半主动绞车升沉补偿系统示意图
2.2主动补偿电机功率与能耗分析
液压蓄能节能钻井补偿绞车的本质是利用液压马达与蓄能器的液气弹簧特性,对钻柱重力势能进行周期性的释放与存储,从而降低补偿绞车的装机功率与能耗。但由于钻机起升系统的效率较低,使得补偿运动能量在回收过程中浪费了大量的能量。为了计算系统能耗,针对补偿海况进行了系统所需主动补偿电机输出功率的计算。
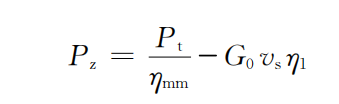
当平台下降提升钻柱时,液压马达及电机做主动功,电机功率为

式中:Pz 为主动补偿电机所需最大输出功率,kW;Pt为被动补偿液压马达的理论装机功率,kW;η
mm为液压马达效率。
当平台上升下放钻柱时,钻柱重力作主动功,电机功率为
根据主动补偿电机功率,单补偿周期内能耗为
式中:W 为系统能耗,kJ;T 为补偿周期,s。
3.结语
升沉补偿系统作为海洋浮式平台的关键设备之一,在国内研制才刚刚起步, 具有补偿功能的海 洋钻井绞车的研制势在必行。本文根据钻井绞车和补偿系统的工作原理,提出了一种新型的绞车,并且该绞车已通过模拟试验验证,方案可行。该方案的运用可大大减轻浮式平台的质量,减少设备占用的空间 。
参考文献
1.廖谟 圣.海洋石油开发[ M] .北京:中国石化出版社, 2016.
2.方华灿.海洋钻井绳索作业时升沉补偿问题的研究 [ J] .华东石油学院学报, 2015(3):20-32.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



