21070219800310****
摘要:随着电子技术产业的不断发展,作为一种全新制动理念的电子机械制动系统(EMB)正在取代传统的液压制动系统,其制动响应快、控制精度高从而更加高效的保障了驾驶员的行车安全。本文主要对EMB系统从制动开始到制动结束的相关控制方法进行研究,建立了包含制动间隙控制在内的EMB执行器三阶闭环PID控制策略。
关键字:电子机械制动系统;制动间隙控制;三阶闭环PID控制;仿真
1 EMB模型
1.1 驱动电机模型
EMB电机选用的是永磁直流力矩电机,其相关工作原理如图3所示。
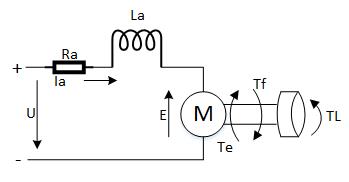
图3 永磁直流力矩电机工作原理
电机在工作时,具有如下的动态方程:
电机电压方程
| | 1 |
电机反电动势方程
| | 2 |
电机力矩方程
| | 3 |
电机堵转转矩方程
| | 4 |
式中:U为电枢电压; 为电枢电流;
为电枢电流; 为电枢电阻;
为电枢电阻; 为电枢电感;E为反电动势;
为电枢电感;E为反电动势; 为电机反电动势系数;
为电机反电动势系数; 为电机转角;
为电机转角; 为电机转速;
为电机转速; 为电机转子和负载等效到电机轴上的转动惯量;
为电机转子和负载等效到电机轴上的转动惯量; 为电机电磁转矩;
为电机电磁转矩; 为电机摩擦转矩;
为电机摩擦转矩; 为电机负载转矩;
为电机负载转矩; 为电机力矩系数。
为电机力矩系数。
1.2 电机摩擦模型
本文中的电机摩擦模型选用的是静摩擦+库仑摩擦+粘滞摩擦这种类型的静态摩擦模型,该模型能够相对全面、真实地模拟电机在工作过程中所受到的摩擦力矩。该模型的数学表达式如下:

静摩擦+库仑摩擦+粘滞摩擦模型
式中: 为电机相对滑动速度; 为电机摩擦力矩; 为外力矩;
为电机相对滑动速度; 为电机摩擦力矩; 为外力矩; 为最大静摩擦力矩;
为最大静摩擦力矩; 为库仑摩擦力矩;
为库仑摩擦力矩; 为粘滞摩擦系数。
为粘滞摩擦系数。
1.3 传动机构模型
对于本文的电子机械制动系统来说,其传动机构可以简化为固定传动比,行星齿轮的输入端与永磁直流力矩电机的转子相连接,其输出端与滚珠丝杠副相连接。对于滚珠丝杠副来说其可以等效为一个与行星齿轮架相连接的刚体结构,将丝杠的旋转运动转换成螺母的平动[4]。相关数学关系如下:
| | 5 |
| | 6 |
式中: 为电机转角;i为行星齿轮减速器传动比; 为滚珠丝杠转角;L为丝杠的螺纹导程;x为丝杠螺母位移。
为滚珠丝杠转角;L为丝杠的螺纹导程;x为丝杠螺母位移。
2.1 电机响应控制
EMB系统中对电机的控制是整个响应控制的核心部分,要求其对系统的输入能够做出快速响应。考虑到控制器件以及相关控制理论的限制,本文选择经典PID控制器作为EMB系统的相关控制器]。传统的EMB系统通常采用串联力反馈控制结构,其中多环串联控制结构采用从内向外的响应方式。对于EMB系统来说,夹紧力是主要控制量,所以应该在双闭环控制系统的基础上增加夹紧力环构成三阶闭环控制系统,其中夹紧力环作为最外环对制动系统的制动力起到相关控制。综上所述,本文的EMB执行器采用的是串联三阶闭环PID控制结构,由外向内依次是夹紧力环、转速环和电流环。
2.2 制动间隙控制
在EMB控制系统中,夹紧力环是通过对电机参考转速的调整来完成对EMB系统中参考夹紧力的响应。因此,当EMB系统参考夹紧力发生变化时其所对应的电机参考转速也会发生相应的变化,即不同目标夹紧力对应不同的电机转速,这种特性会使EMB系统消除制动间隙的时间不固定。并且车辆制动器在使用过程中会出现磨损,随着磨损程度的增加其制动间隙也会逐渐增大。针对上述提出的两点问题,由此提出了相应的制动间隙控制策略,用以解决制动间隙消除时间不固定以及制动衬片磨损的问题。
本文提出的制动间隙控制策略主要是基于EMB系统夹紧力、车速以及丝杠螺母位移这三个指标建立起来的,通过对相关参数的分析确定制动间隙是否消除、制动过程是否结束、是否产生了固定的制动间隙。根据对制动间隙控制策略所依靠的指标分析可得,相关控制策略是建立在EMB三阶闭环PID控制系统的基础之上的。车辆在行驶过程中并不是一直处于紧急制动工况下,因此汽车车轮并不是一直处于即将抱死拖滑的工况下,常规制动才是经常遇到的行驶工况,所以汽车制动器并不是始终处于最大制动力输出的情况。综合上述汽车行驶工况可知,在常规制动以及触发ABS进行的防抱死制动工况下,相关制动间隙控制策略可以简述为以下步骤:
为了能够快速消除制动间隙,在制动间隙消除阶段将目标夹紧力按照EMB系统能够提供的最大夹紧力进行设置,本文相关制动器所能提供的最大夹紧力为24KN,使电机能以尽可能短的时间消除制动间隙;
当丝杠螺母位移达到设定值范围,制动器夹紧力刚好不为0时即为完成制动间隙的消除。此时,根据车辆行驶工况,制动器实时目标制动力便根据系统设定值进行相关调整,直到车辆停止,车速为0;
当车辆停止时,给电机输入相应的反转电压,直到制动器夹紧力为0并且丝杠螺母位移回到零位移点处即产生固定制动间隙,控制结束。
EMB制动间隙控制策略具体设计流程如图6所示,相关工作过程可以简述为以下步骤:
驾驶员踩下制动踏板并将此踏板信息传递给中央控制单元ECU,ECU结合其他传感器信息计算出此时每个车轮所需制动力的大小并将此信息传递给每个车轮EMB系统中的控制单元;
EMB系统在接受到制动信号后,初始时刻将EMB系统中的目标夹紧力设置成24KN用以完成制动间隙的快速消除;
当制动间隙为0,实际夹紧力刚好不为0的时候,此时将目标夹紧力切换成系统实时期望的夹紧力,进入制动力跟随阶段;
当车速为0,车辆处于停止状态时进入制动间隙产生阶段,给电机输入相应的反转电压。当夹紧力为0时开始产生制动间隙,从此时开始直到丝杠螺母返回到初始零位移,判定已经产生固定的制动间隙。
3 结论
本文设计的EMB三阶闭环PID控制策略,能够使EMB的响应速度和控制精度得到响应的提升,从而满足系统设计要求;通过识别制动器夹紧力、滚珠丝杠位移和车速的制动间隙控制策略,能够在目标制动力不同的情况下,以尽可能短的相同时间去消除制动间隙。并且在制动结束后滚珠丝杠能够再一次返回到初始位置,为下一次制动做准备,避免了因制动衬片磨损带来的麻烦,进一步提高了制动的安全性。
参考文献:
[1] 朱雪青.汽车电子机械制动器的控制方法研究[D].合肥:合肥工业大学,2019.
[2] 王俊鼎.电子机械制动控制系统的研究[D].杭州:浙江大学,2016.
[3] 李灿华.基于EMB的汽车制动控制研究[D].重庆:重庆大学,2015.
作者姓名:许鸿,性别:男,籍贯:辽宁省锦州市,学历:大学本科,学校:渤海大学,研究方向;电子

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号