塔里木大学 843300
摘要:目前我国在对采用智能垃圾废物综合处理智能垃圾箱的相关技术基础研究和产品设计上仍然存在很大的不足,本文将研究设计一款基于STC89C52RC的智能垃圾桶。该控制系统主要是利用微型超声波距离测距传感电路、光电距离传感器电路驱动控制模块、电机电路驱动控制模块和语音识别报警驱动模块等多个主要功能模块共同设计相组而来构成,并且以微型超声波测距传感器、光电距离传感器和主控单片机为主要技术控制核心,利用光电传感器模块来实时自动采集各种距离控制信息,之后经过各种A/D信号转换后就可以直接让主控单片机向光电传感器前端发出距离指令。当系统设置的检测距离已经超过使用超声波检测传感器时所需要检测的垃圾人与自动垃圾桶之间的设定距离,则整个自动垃圾桶将被自动将人打开或将门翻盖,延时3秒后自动将门打开或翻盖关闭;同时若通过RPR220光电系统检测至整个垃圾桶内食物容量已满,系统将对其他人进行超声视频或者超声语音警示提醒。同时这个操作系统还充分具备了系统结构简单、性能稳定、运行方便、降低系统成本和实现智能化的诸多重要特征。
关键词:单片机,传感器,垃圾分类,垃圾箱
A Multifunctional Bin Control System
Abstract: At present, there are many deficiencies in the design of intelligent dustbin in our country, so this paper designs a multifunctional dustbin based on stc89c52rc. The system is composed of ultrasonic ranging circuit, photoelectric induction module, motor drive module and voice alarm module. The core of the system is ultrasonic sensor, photoelectric sensor and single-chip microcomputer. The sensor is used to collect distance information, and then the single-chip microcomputer sends instructions through A / D conversion. When the set distance is greater than the distance between the person and the dustbin detected by the ultrasonic sensor, the dustbin will automatically flip and close after a delay of 3 seconds; if rpr220 photoelectric detects that the dustbin is full, the system will give a voice prompt. At the same time, the system has the advantages of simple structure, stable performance, convenient operation, low cost, intelligent and so on.
Key terms: single chip microcomputer,sensor ,refuse classification, dustbin
关于多功能垃圾箱的设计,分为两个装放垃圾的箱体,一个是可回收垃圾,另一个为非可回收垃圾。通过利用太阳能电池板有效地利用太阳能资源来给蓄电池充电的方式,可以减少对其它能量的消耗。在垃圾桶的外部装有LED电子屏,能够通过荧幕宣传安全环保等知识,提高市民的安全环保意识;另一方面LED电子屏带有经济效应,对于产品有宣传作用,特别适合于拥挤的都市,还可以提高都市的科技水平。垃圾箱能够实现顶盖的自动开启和闭合,并且对垃圾箱内部进行设计,满足吸附物质对气味的清除,从而保证垃圾桶的臭味不外流,保障周围空气的清新,减少大气污染。还有垃圾箱有对自己周围的垃圾有自动吸尘的功能,对清洁街道有更有效的作用。
(1)人靠近箱体,箱体外上部红外感应器接受到人时所发生的感应,继而使垃圾箱做出的动作。
(2)电机驱动,选择适合的电机。首先要求电机的性能稳定,其次是对电能消耗尽量的少,还有箱体内部的设计对电机的利用率最高。
(3)无线通信装置,当垃圾箱需要人为解决问题时所对人做出的信息响应,通知人需要干什么。
(4)语音播放,如果垃圾箱出现燃烧问题,可以提醒箱体周围人,进而快速撤离,保障安全。
(5)烟雾传感、换气装置,当垃圾燃烧达到一定烟雾浓度会使通信装置发出信号。
(6)箱体供电、电能分配,太阳能发电是整个系统的能量来源。
设计多用途垃圾桶控制系统是为了充分满足用户的要求,设计了一些切合实际需求的功能。例如有垃圾桶自动打开翻盖,自动报警,自动喷涂消毒药物。为防止使用者在投放垃圾时被各种细菌所侵害,特别设计以上这些功能,并且通过以上两个步骤,来给垃圾箱进行消毒,以避免用户直接接触垃圾箱,系统整体框图如下。
图2-1 系统整体框图
该设计采用的是STC89C52RC单片机[10],该单片机所拥有的功能特性有4K字节闪速存储器、128字节内部RAM、和32个可编程I/O口线、2个16位定时器/计数器、1个5向量两级中断结构、一个全双工串行通信口、片内振荡器以及时钟电路。
STC89C52RC引脚功能简介:
P0口是三态双向口,通称数据总线口。P1口是专门供用户使用的I/O口,是准双向口。
P2口是从系统扩展时作高8位地址线用。
P3口是双功能口,该口的每一位均可独立地定义为第一I/O功能或第二I/O功能。
复位电路可以被应用于处理在该电路中的初始运行状态。为了有效确保微机系统安全稳定地运行,复位控制电路在系统中发挥着不可估量的作用。在我国。复位控制电路设计主要电路包括四种电路形式:一个微分型自动复位控制电路、积分型自动复位控制电路、比较器型自动复位控制电路以及一种看似敲门犬型自动复位控制电路。工业生产中常见的组合复位工作模式主要分为有2种:一种模式就是手动组合复位、二种就是通过上下行机电自动组合复位。复位电路图如图2-3所示。
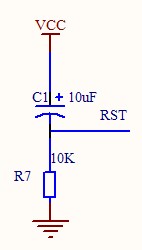
图2-3复位电路图
通过实际垃圾生产环境需求设计情况分析来看,本次项目设计的垃圾系统安装选址主要位于一个垃圾箱内部,通过手动复位会容易被来往人流按到以造成元件的误操作,所以本设计采用的是上电复位的控制方式。
晶振是时钟电路中一个重要的元件,现实生活中,许多设备中都出现它的身影,其中该部件最重要的作用是向各个单元提供基准频率,来保证电路中不会出现工作频率不稳定等问题。该系统采用晶振电路提供基础的时钟信号。为使各个组成部件都能够长期地保持相位同步地进行操作,工业生产中每一个系统都将会共享一个晶振。本次设计的系统就是仅用一个晶振来实现同步的。晶振电路如图2-4所示。
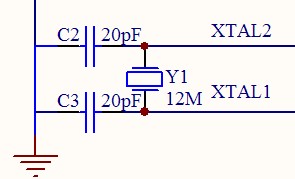
图2-4晶振电路
光电传感器模块主要是利用光电式传感器的特点是利用光线强度来感应周围的物体,并且可以检测到周围有无特定的物件,然后把扫描出来的信息发送到单片机。该光电传感器模块的电路框图如下表2-5所示。
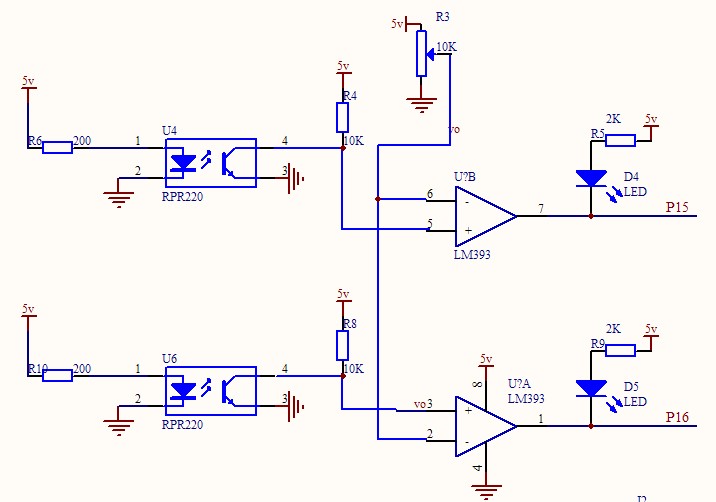
图2-5光电感应模块电路
本方案所设计的超声波电路主要采用 hc - sr04超声波检测距控制模块。超声波测距模块可感应有无物体接近,可在一定程度上测量物体和自身的距离。为了保证实现传输和测量两个物体之间距离的功能,该模块主要是通过两个物体所发射的超声波和两个被测物体之间反射回波的时间差关系来进行确定,声波的传输和两个物体之间媒介的传输有关,通过公式可以计算得出距离。
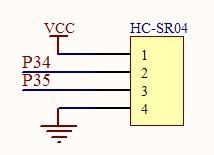
图2-7超声波测距模块电路图
语音模块采用了awt588d四个语音处理模块。单线语音处理模块的控制电路设计框图及其设计电路如下文的电路图2-8所示。

图2-8语音模块电路图
本设计为线路更加稳定,采用了稳压电路,如图2-9所示。
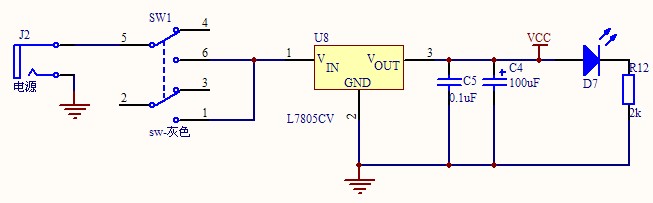
图2-9稳压电路
第三章 系统软件设计
上电后,系统驱动程序将首先自动初始化每一个电源模块。为了更好地保证使通用超声波反射模块设备能够正常地准确测量反射距离,避免各种角度可逆的方向反射超声波形,设置了200ms的测量延时。定时器正常开始工作时,超声波测量控制模块、光电光学传感器测量模块等主要模块就已经基本开始了正常工作。如果一个步进式自动超声波垃圾测量系统模块已经能够准确检测到使得人与人和垃圾桶的空间距离比例远小于80cm,步进式垃圾电机将能够继续不断向前左右旋转,并且还可能会继续伴随着一个新的语音视频广播"请分类垃圾"。延时3s后,电动机将逆向加速旋转。该操作系统用于编译应用程序的系统总体工作流程图及框图结构如下文本表3-1所示。
图3-1系统程序总体流程图
通过终端单片机向内部超声波定时模块终端发出一个10us的快速高电平定时脉冲并提供给终端单片控主机内部超声波定时模块。当两个超声波计时传感器的读入输出端转换成高或低电平时,单片上电机内部的读出定时器就会启动正常计时;但是当读出定时器的读出输入端再次转换成低或高电平时,定时器就可能会自动停止正常计时工作,系统启动后由它开始自动精确读取读出定时器输入t0的实际工作持续时间,并通过下列计算公式应用来精确计算读出输入之间的计时距离。
本次设计的自动翻盖部分利用了电动机的正、反方向进行控制。当系统启动后才开始运行,通过光电传感器模块来判断一台电机的正转方向是否有可能需要进行正转,如果有可能需要就交换器给 三个通电方向进行正转,当一个正转方向结束后则会延时3m 三个电机的方向进行逆转,依次交换器进行充电。该电机的驱动子流程框图如下表3-3所示。

图3-3电机驱动子程序流程图
第四章 系统调试
最后一步是对系统的所有功能都进行了调试,通过这些调试可以将系统中的各种软件和编程错误及其他硬件制作出来的故障全部排除,所设计的多功能垃圾箱只有在经过了调试之后才能算是真正的完成。
系统软件在整个系统处于核心地位,通过它们各个部件进行协调工作,软件调试问题也是非常重要。由于本次软件设计所用的是C语言,在调试的时候出现了以下的问题:
(1)由于初次使用Keil,对它的的调试环境有所不了解,通常会发现程序发生报错。
(2)编译时出现数字、字母的混淆。
该系统硬件调试部分需要检查各个线路板之间有无出现断线及错误的地方,特别检查连接电源端与接地器的芯片是否搞错,电路板中所采用的芯片也是否受到了损坏,再开始对各部分的硬件进行调试。最终对整体电路进行调试。
参考文献
[1]伊怀杰.太阳能垃圾箱亮相纽约街头[J]. 广西城镇建设,2005(10):91-91.
[2]戴蒙.英国试验太阳能压缩式垃圾桶[J]. 环卫科技网,2011(03):6-7.
[3]张海宁,郑世帅,孙龙鹤.无线环保与火警监测智能垃圾箱[J]. 科技创新与应用,2013(11):27-28.
[4]蒋晶,李琴.环保垃圾箱[J].科技展望,2006 (04):22-22.
[5]Felip Gracia, Jordi Llorens. Emilio Gil Performance of an Ultrasonic Ranging Sensor in Apple Tree Canopies[J].Sensors 2011(03):2460-2477.
[6]Queiros, R. ;Correa Alegria,F. Silva Girao. Cross-Correlation and Sine-Fitting Techniques for High-Resolution Ultrasonic Ranging[J]. IEEE Transactions on Instrumentation and Measurement 2010(12):3227-3236.
[7]李伟国.网记看两会:太阳能垃圾桶盖子可自动开关http://www.bjstm.com/news_311.html,2013.6.6.
[8]郭爱民.多功能垃圾箱[J]. 中小企业科技,2006 (05):52-53.
[9]汤俊良,黄国清.智能垃圾箱[J]. 无线电杂志,2004(11):12-14.
[10]张毅刚,彭喜元.单片机原理与应用设计[M].电子工业出版社,2008.
致谢
通过我们不断的努力,在恩师罗继东老师的指导下,最终顺利的完成此次设计论文的撰写。罗继东老师对学术非常的严谨,对我悉心指导,总是不厌其烦的纠正我、提醒我,甚至牺牲自己的节假日帮我修改。在我的设计工作及论文写作的各个阶段,罗老师都给我提供了最大的支持和帮助,所以再次向我们崇高尊敬的罗老师先生表达我最真诚的衷心感谢!与此同时,我要特别感谢我的各位学长及其他同学对我的一切支持和关心帮助,感谢和我一起奋战到底,是你们的支持鼓励和陪伴让我们一起走到最后!最后,感谢辛勤评阅论文的老师、专家、学者。而由于知识的缺陷,本文尽管经过多次的修改但还是会有不少的错误,希望各位老师能够批评指正,我表示非常的感谢。
由于知识的缺陷,本文尽管经过多次的修改但还是会有不少的错误,希望广大老师能够给我批评和指正,我表示非常的感谢。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



