中国能源建设集团黑龙江省电力设计院有限公司 黑龙江 哈尔滨 150078
摘要:由于近些年无人机技术的兴起,数字线划图(DLG)采集的方式不再单一,人们开始使用无人机倾斜摄影测量的技术来获取DLG数据,但无人机倾斜摄影测量获取大比例尺DLG,需要布设多个控制点,实施过程耗时耗力,基于此,本文提出一种基于向量方位角的点位误差校正法,在无控制点的情况下获取大比例尺DLG。该方法通过无人机采集的POS数据对地面点坐标进行解算,以少量的特征检测点的点位误差作为位移向量,并计算该误差向量的坐标方位角,将观测向量的方位角平均值确定为误差偏移方向、平面中误差为偏移距离,对DLG进行整体误差校正。实验结果表明,通过该方法在无控制点采集的情况下,精度能够达到1∶500DLG的要求,为无人机快速、高效地获取大比例尺DLG提供参考。
关键词:无人机;DLG;倾斜摄影测量;POS数据;向量方位角
引言
近年来,随着我们对数字线划图(DLG)精度质量、生产速率要求的提高,单靠传统人工测图的方法已不能够满足现在的快速生产需要;而无人机倾斜摄影测量技术由于其高效和自动化便捷的特点广泛应用在测绘行业,成为近些年来的研究热点。目前,DLG的获取方式主要有传统人工测图、卫星遥感影像获取和无人机遥感影像获取。传统的人工测图主要以人工外业测量为主,优点是可控制误差精度,了解实地情况,但耗时耗力,效率低且受天气、环境等因素的影响。遥感影像获取DLG主要以高分卫星影像图进行采集,其优点是可以节省大量的人力物力,但精度不高。无人机技术在测绘行业也是运用广泛,为测绘工作提供了极大的便捷,目前,已有不少学者将无人机技术运用在获取大比例尺DLG上[1]。
数据与方法
1.1数据采集与预处理
1.1.1无人机航拍影像获取
首先在实验区规划无人机航线,共设计了21条航线以倾斜摄影测量方式对实验区进行影像数据和POS数据采集。对无人机实验区数据采集共设计了1个飞行架次,相对航高为130m,航向重叠率80%,旁向重叠60%,获取航拍影像4295张。
1.1.2数据处理
经过外业无人机数据采集,用SMART3D软件对影像数据进行三维建模,主要流程是:首先将获取的航拍影像和POS数据(经纬度、飞行高度和飞行姿态的旋转角)导入软件进行数据预处理,对影像数据进行畸变校正、旋转、增强、均光等预处理,系统自动对校正后的影像数据进行匹配;通过相对定向、区域网平差进行空三解算生成密集点云,建立TIN三角网并创建白模,再通过纹理映射建立三维建模,为节省建模时间,这里对建模的范围进行感兴趣区域瓦片选择,同时参数输出为国家2000坐标系、85国家高程基准、3°高斯投影带、中央子午线114°,生成数据模型为OSGB格式(在purpose选项中,确定输出成果形式,输出三维模型为3DMesh)。基于无人机三维模型绘制DLG,使用EPS2016地理信息工作站软件进行DLG的拟合生成,采用EPS2016双窗口呈现正射影像、实景三维模型特点,“以面代点”测量,采集过程中直接采集墙面,程序自动拟合计算出房角点,通过二三维联动采编实现数字线划图最后的绘制工作。具体流程如图1所示[2]。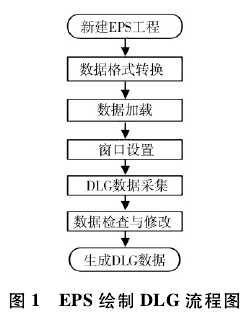
1.2基于向量方位角的点位误差校正法
对于基于向量方位角的点位误差校正法,把高精度RTK实测DLG作为真实坐标点,与无人机获取DLG中检测点之间的点位误差作为观测向量,通过点位误差计算其坐标方位角,并采用概率分布平均值确定点位误差的偏移方向,以点位平面中误差为偏移距离进行整体校正[3]。具体步骤有:1)向量方位角计算。向量是同时具有大小与方向的数学工具,且向量是基于坐标的,向量的模表示位移量,向量的方向表示位移方向,把RTK实测点坐标作为向量的起始点,DLG检测点坐标为终点,来表示观测向量;方位角是在测量坐标系中顺时针从北方向起到某一直线的角度;向量方位角是通过直线定向的方法,以检测点与实测点之间的点位误差差值作为观测向量,对其进行定向,和坐标方位角的计算方法类似,向量方位角。2)向量方位角概率分布分析。假设观测向量数为n,分布在测量坐标系中某个象限的向量数为m(m≤n),并用概率分部直观地体现整体方向偏移,则方位角分布概率为p=m/n(其中0≤p≤1);若某象限中的p值较大,则表示该象限分布了多数的观测向量,DLG的点位误差在该象限的方向上有整体的偏移或趋势;因此采用向量方位角法表示检测点点位误差变化是适宜的,符合点位误差偏移数据分析的需求,是一种高效、定量、可视化程度高的分析方法。3)点位误差校正。计算出检测点点位的偏移距离以及方向,对无人机获取DLG进行反向校正,得到校正后的DLG。4)误差分析。点位误差校正后得到一组新的DLG数据,为验证该方法满足1∶500DLG的精度要求,对校正后的DLG数据进行点位平面误差分析
[4]。
二、实验结果与分析
2.1DLG数据成果
本文除通过无人机以无控制点倾斜摄影测量方式获取影像数据外,还对实验区进行RTK外业实测,获取高精度DLG数据,以RTK实测数据作为真实坐标数据,对无人机倾斜摄影获取的DLG数据进行坐标点检测,两种方式获取的DLG成果如图2、3所示。

2.2无人机倾斜摄影测量
DLG点位精度评价随机选取具有地形特征的8个检测点,对基于无人机生产的DLG进行点位误差精度评价,检测点点位误差计算结果。
2.3DLG平面误差分析校正
根据向量方位角的象限分布,将8个检测点的向量在测量坐标系中直观体现出来,并通过公式(1)计算分布在该象限中的方位角及方位角平均值。可以看出,误差向量全部集中Ⅰ象限,第Ⅰ象限的平均方位角为51.29°,作为误差偏移方向,以8个检测点的平面中误差值δxy作为误差偏移距离,误差校正时以误差向量的平均方位角为方向基础进行反方向校正。无人机获取的DLG将以dat格式文件保存并使用CAD软件打开,通过CAD软件中的“测站改正”工具,指定改正方向和距离对DLG进行批量的坐标转换,输出校正后的DLG坐标点,并随机选取50个地物特征检测点,进行点位的误差精度评价,计算出校正后检测点的各轴向误差。
结语:
本文运用无人机倾斜摄影测量技术建立三维模型,以三维模型为基础数据采用EPS软件提取出DLG影像,验证了在无控制点的情况下对无人机获取DLG进行误差分析和校正,能够达到1∶500大比例尺DLG的精度要求,并有效地提高成图的效率,具有人力投入小、效率高、速度快等优点,并且前期工作开展简单,后期数据处理方便,可为无人机获取大比例尺DLG提供参考。
参考文献:
[1]邓科.无人机航测技术在村庄规划中的应用研究[J].测绘与空间地理信息,2021,44(02):199-201+205.
[2]亓信玖,黄风华,李传林,林国滨,曹俊.复杂地形下无人机倾斜摄影技术的校园三维实景建模[J].计算机系统应用,2021,30(02):110-116.
[3]周子渊,高璐媛,党维勤,田金梅,刘硕.无人机倾斜摄影1:500不动产测量技术在侵蚀沟监测中的应用[J].中国水土保持,2021(02):60-62.
[4]秦晨西.无人机倾斜摄影测量在矿山煤矸石方量测算中的应用[J].科技与创新,2021(03):178-179.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



