身份证号码 : 23100419830510****
摘 要:在车辆的运行过程中,准确的车速计算不仅是防抱死制动系统和车身稳定系统工作的基本条件。同时也是车辆主被动安全控制系统正常工作的必要条件。目前车速的计算普遍采用基于轮速的估计方法。但是在车身发生滑动的情况下,该方法会存在较大的误差。本文介绍了一种基于卡尔曼滤波和模糊逻辑的车速估计方法。模拟数据显示,在车身发生相对滑动时,还是在车辆正常行驶时,该方法都能保证车速的准确性。
关键词:车速;滑动;卡尔曼滤波;模糊逻辑
Application of Kalman filter on the vehicle speed estimation
Xiaowei Qiao
Abstract: during vehicle driving process, accurate longitude vehicle speed calculation is not only the base condition for anti-lock brake system(ABS) and electronic stable program(ESP), but also is the critical requirement for vehicle active or passive safety system. estimation method based on wheel speed is adopted usually. But in case of the host vehicle is sliding. This method can produce enormous errors. This paper introduce an estimation method that based on the Kalman filter. Result from simulation shows that, this method can remain accuracy both in normal and sliding scenarios.
Keyword: longitude vehicle speed, sliding, Kalman filter, fuzzy logic.
在防抱死制动系统及车身稳定系统的应用中,准确车速的估计是这些系统有效实施的关键因素。此外,在目前主流的车辆主被动安全系统中,车速依旧是这些系统正确工作的重要依据。故车速的测量是目前车辆安全行驶的重要因素。
目前,车速的测量和估计方法有很多种。其中基于轮速的车辆速度计算方法是最常用的方法。由于车辆的驱动轮常出现打滑现象,一般可用非驱动轮的轮速作为车辆车速的数据来源,此外一些估计算法对车辆的滑动状态进行估计,以提在仅有轮速信号的前提下车速估计的准确性[1]。但随着车辆功能的增加,及越来越多的4轮驱动车辆的广泛应用,仅采用轮速传感器计算与估计车辆的速度误差在某些场景下偏高。于是,车辆加速度传感器及转动传感器越来越多的作为轮速传感器的补充应用在车速计算与估计算法中。于是,基于卡尔曼滤波方法的多传感器车速估计得到了广泛的应用[2][3][4]。
对于卡尔曼滤波使用的协方差矩阵。大致有以下几种,采用经典卡尔曼滤波的固定的协方差矩阵,此时根据模型和传感器具体参数计算选择。最大似然估计[5],贝叶斯估计等。对于经典卡尔曼滤波器来说,在车辆与路面发生相对滑动的情况下会产生较大误差。而自适应卡尔曼滤波的很多方法中要么模型建立复杂,要么计算工作较大。基于这个情况,采用模糊逻辑判断车辆段运行状况非常合适,模糊逻辑控制不需要建立精确的数学模型,数学意义明确,参数调整简单,运算量也很小。非常适合在目前MCU等计算能力较差的条件下实施。故本文选用目前应用较多的模糊逻辑来修正不同场景下的协方差矩阵。
根据前文分析,该模型使用车辆纵向加速度计与车辆轮速传感器两种传感器。一般实际车辆通常使用多个轮速传感器。本文为了简化分析,车辆在平直路面直线行驶,采用两个前轮轮速作为测量车速数据。同时,一般ABS或ESP系统中的加速度传感器多为多轴传感器,本文暂仅考虑车辆纵向方向的加速度,作为加速度测量值的数据来源。
利用车辆的轮速与加速度传感器,根据卡尔曼滤波器原理,并假定系统的输入信号为零, 建立系统模型如下:
 式 1
式 1
 式2
式2
式中,vt,at 代表车辆的实际速度与加速度。vm,am代表测量的车辆车辆速度与加速度,其数据分别来自车辆中的轮速传感器与加速度传感器。k,k+1分别代表 k, k+1时刻的采样数据。式1中的数据上方的箭头“^”代表为当前时刻的估计数据,而“-”代表为先验数据,因为式1尚未采用测量数据对最终结果进行修正。R Q分别为系统模型的和测量模型的协方差矩阵,均为2x2矩阵。τ为系统的采样时间。多数情况下,一般可简写为:
 式3
式3
 式4
式4
其卡尔曼增益的值为:
 式5
式5
式5中,P须在每次迭代计算之前计算好:
 式6
式6
而后,利用卡尔曼增益输出当前采样周期的输出:
 式7
式7
最后 跟新P矩阵,用于下次数据迭代计算:
 式8
式8
式8中,I为单位矩阵。根据式3至式8 共5个公式,即可根据当前周期的采样结果进行迭代。
在合适的模型条件下,卡尔曼滤波器是收敛的。故公式中的初值通常不重要,为了保证收敛速度,x0,v0可以设置为0,符合一般汽车控制器在上电初始的条件。P0一般设置为单位矩阵即可。
相比于初值,P Q协方差矩阵在公式中的影响更大。通常情况下:无论是模型,还是传感器的测量数据均包含一定的噪声,并且在绝大多数场景中,我们可以近似的认为,该噪声的高斯白噪声。
根据卡尔曼滤波的原理,最终的输出数据为模型估计与传感器测量数据的加权平均。而权重则取决于各自计算公式中的协方差矩阵。当该矩阵的数值较大时,则认为该数据偏离真实数据的程度就越大,其数据或模型输出值更加不可信,从而降低该数据的权重。实际情况下,模型数据中速度与加速度为积分关系。高斯噪声在长时间累加的情况下趋于零,故可认为加速度的噪声数据不会影响速度的噪声。于是P矩阵的协方差数据设为0,仅有方差数据。一般方差可以根据实验或仿真得到。对于测量数据由于速度与加速度传感器分别来自不同的传感器,即相互无关。协方差数据仍然为0,仅保留方差数据。实际的轮速传感器一般为脉冲式数字传感器,其精度和噪声非常小。而加速度传感器的噪声相对较大。在本文中,可以将加速度传感器的噪声设为速度传感器噪声方差的10倍。根据分析,P Q矩阵数值表示为:
 式9
式9
 式10
式10
传统卡尔曼滤波器的P Q矩阵为定值,这种方式在车轮与地面未发生相对滑动的情况下表现较好,但是一旦车轮发生相对滑动时,则轮速传感器数据会极大的偏离车辆实际速度。此时应该更多的相信车辆的加速度传感器数据与模型估计数据的权重,降低轮速传感器的权重。但如何量化该权重是一个较为困难的事情。故本文使用模糊逻辑进行车辆是否打滑与否的判断,并且量化打滑程度的大小。模糊逻辑无需建立精确的数学模型,计算量小。在系统较小时凭借仿真甚至经验即可对参数进行调整,从而获得不错的效果。根据模型原理。系统在发现车辆打滑时,会极大的增大Qnv的数值,从而在后续迭代环节降低轮速传感器的权重,保证整个环节输出的准确性。
在本文应用中,如何准确识别车辆打滑的场景是该逻辑正确执行的关键。根据车辆打滑的特点,设计模糊控制逻辑为轮上速度与加速度与模型速度与加速度差值作为控制器的输入。当车辆发生打滑时,当前周期采样的轮速及轮上加速度与前一周期的模型输出产生较大差异,若此时模型能正确反映车辆的实际状况,在发生滑动的短时间内,会大幅降低轮速传感器的权重,保证车辆速度计算的准确性。根据此原理,设计模糊控制逻辑输入为两个,分别为当前轮速与上周期的速度差值|vm-vt|,当前轮上加速度与上周期模型加速度的差值|aw-at|。根据滑动程度的大小,分别设计三个模糊状态,S,M,L。代表滑动程度由小到大。隶属度函数如图1-3所示:
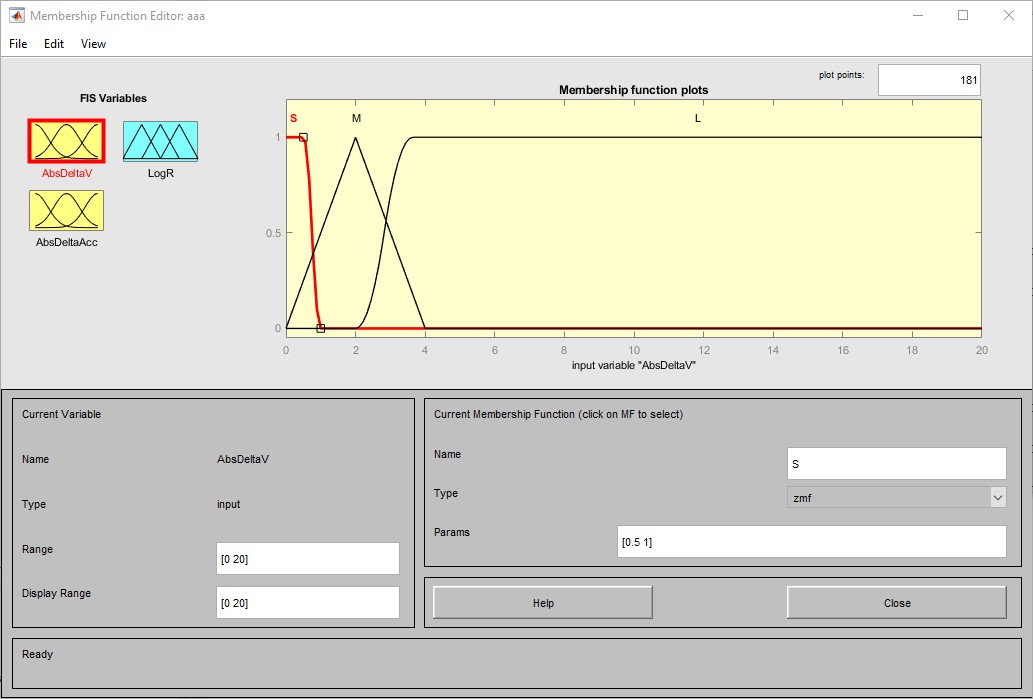
图1 速度插值输入隶属度函数

图2 加速度差值输入隶属度函数
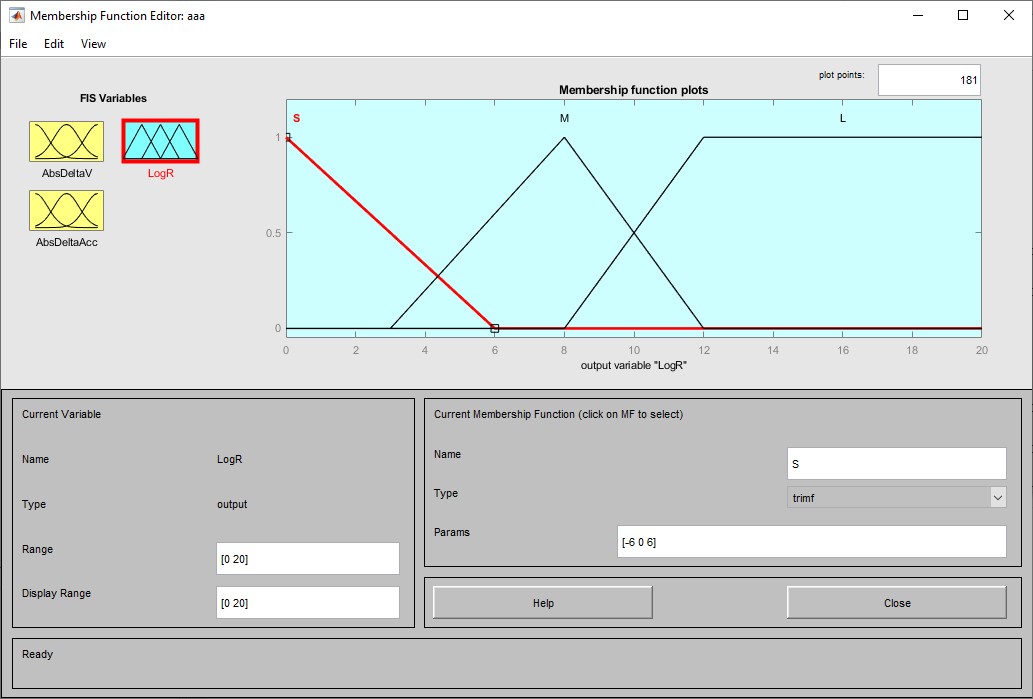
图3 模糊控制逻辑输出隶属度函数
图中输入值较大的原因为信号的噪声水平较高,若条件适当的情况采取降噪效果更好的手段可以降低输入信号的阈值,并提高整个模型的效果。
实际的车辆中,无论是轮速传感器还是加速度传感器的输出,都含有一定程度的噪声。过高水平的噪音会影响模糊控制逻辑的输入状态,甚至产生错误的输出。为了正确的功能实现,必须对两个传感器的输入进行降噪。由于传感器的噪声通常认为是高斯白噪声,其频谱在所有的频域上均匀分布,故常规意义上的IIR、FIR滤波器均无法实现较好的滤波效果。一般通常利用高斯噪声长期的统计上幅值的期望为0的特性进行滤波。最常用的是利用过采样技术对采样数据进行平滑滤波。但由于本文模型中仿真频率与采样频率设定相同,故无法使用该技术,由于卡尔曼滤波具有压制高斯噪声的能力,故本文中采样噪声同样使用卡尔曼滤波实现。文中,对加速度传感器,轮速传感器,即由轮速传感器计算得到的轮上加速度值均使用该卡尔曼滤波。故按照以上分析,整个系统的模型如下图4所示:
图4 系统分析模型
其噪声抑制的卡尔曼滤波器模型与式3-式7相同,但其所有参数与输入信号均由向量或矩阵退化为数值。A,H值设为1即可。P Q的数值根据传感器的噪声水平设置,若噪声水平较高,则需要提高传感器的方差Q,增强消噪效果,但此时,系统的响应也会随之变慢。本文设置系统噪声方差为传感器噪声方差的0.1倍。其余处置参照系统模型即可,一般影响不大。
为了验证该模型的有效性,本文采用carsim软件模拟特定场景下的车辆行为,并与simulink进行联合仿真。Carsim软件在参数合理且有效的设置条件系,其模拟结果非常准确,故被各个汽车领域厂家使用。
在仿真中,选择一辆四驱车辆作为数据来源,设置平直路面,车辆直线行驶。基本符合大多数场景下的形式条件。为了仿真车轮滑动的场景,设置地面摩擦系数0.5。由于模型的输出并不包含噪声数据,为更接近真实的场景。为模型中轮速与加速度数据施加了一定程度的高斯噪声。与前文分析,将加速度传感器的默认噪声水平设置为轮速传感器的10倍。仿真车辆由0kph急加速至100kph,随后紧急制动,模拟出车轮加速打滑场景与制动打滑场景。仿真并记录数据。
首段加速打滑场景结果如下:

图5加速打滑场景仿真结果
图5中的实际车速与加速度为carsim模型输出数据,在分析中用于代表实际的真实数据。由上图中可以看到,在其加速阶段。由于车轮发生打滑,该场景被模糊逻辑正确识别,模型更多的采用加速传感器数据,更加的接近实际速度。而传统卡尔曼滤波器此时依然更多的采用轮速速据,偏离实际值较大。而加速度传感器数据不受打滑现象的影响,故两种方法在打滑场景下实际输出差距不大。在车辆没有打滑的情况发生时,系统模型又能很好的跟随轮速数据,获得较低噪声水平的数据输出。
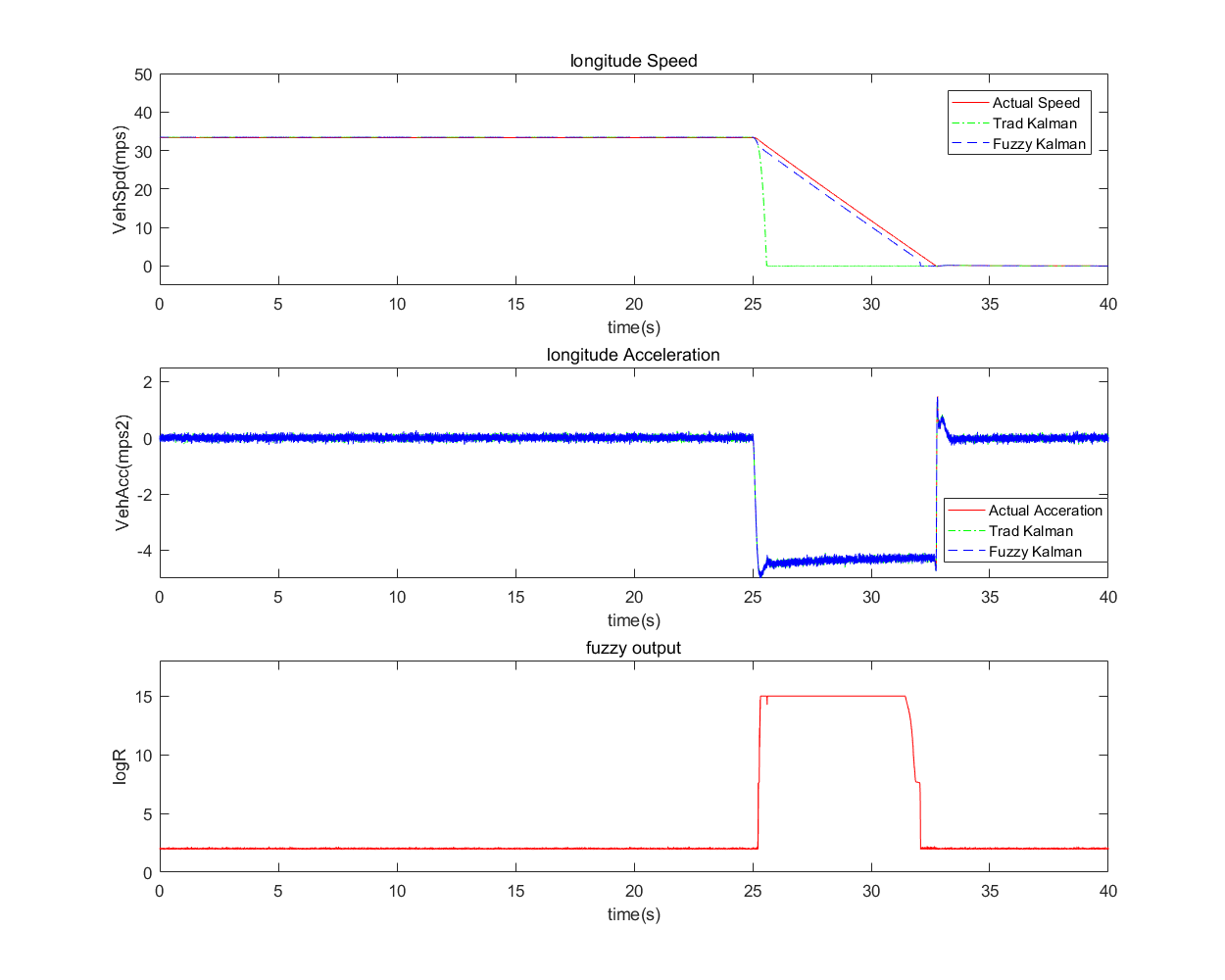
图6 制动打滑场景仿真结果
制动打滑场景下与加速打滑类似,当车辆紧急制动时,发生打滑现象,此时模糊逻辑依然能正确识别该非正常场景,从而降低轮速传感器在模型中的权重,基本符合实际的车辆速度。而传统的卡尔曼滤波器依旧会产生较大偏差。
根据仿真结果显示,基于模糊逻辑的卡尔曼滤波器在处理车辆打滑时的情况非常有效。而若车辆没发生相对滑动,又可以享受卡尔曼滤波带了的低噪声输出数据。取得了良好的效果。
参考文献:
1[1] Fangjun Jiang and Zhiqiang Gao,An adaptive nonlinear filter approach to the vehicle velocity estimation for ABS[C] Proceedings of the 2000. IEEE International Conference on Control Applications. Conference Proceedings (Cat. No.00CH37162), Anchorage, AK, USA, 2000,490-495.
2[2] K. Kobayashi, K. C. Cheok and K. Watanabe, Estimation of absolute vehicle speed using fuzzy logic rule-based Kalman filter[C],Proceedings of 1995 American Control Conference - ACC'95, Seattle, WA, USA, 1995, pp. 3086-3090 vol.5.
3[3] Watanabe, K., Kobayashi, K., and Cheok, K.,Absolute Speed Measurement of Automobile from Noisy Acceleration and Erroneous Wheel Speed Information[C] SAE Technical Paper 920644, 1992.
4[4] M. Tanelli, S. M. Savaresi and C. Cantoni, Longitudinal vehicle speed estimation for traction and braking control systems[C] 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 2006, pp. 2790-2795.
5[5] Mohamed, A., Schwarz, K. Adaptive Kalman Filtering for INS/GPS.[J] Journal of Geodesy 73,193–203(1999).
作者简介:乔晓崴(1983-05-10),男,汉族,籍贯:山东省招远市,当前职务:高级软件工程师,当前职称:中级工程师,学历:硕士,研究方向:自动驾驶

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



