辽宁科技学院 辽宁省本溪市 117000
摘要:本文设想了一种基于Arduino的智能垃圾分类体系。该系统主要由电机驱动模块、称重模块、压力传感器模块、语音报警模块等功能性模块组成,以超声波传感器、RPR220光电传感器和Arduino为主要控制模块为核心,通过各类传感器采集垃圾的分类信息,再经过A/D转换让单片机发出指令对垃圾进行区域分拣。智能垃圾分类系统符合当今大数据时代,具有一定的研究理论价值,更精准的进行垃圾分类收集可以减少垃圾处理量和处理设备,降低处理成本,减少土地资源的消耗,具有社会、经济、生态三方面的效益,具有一定的实际应用价值。
关键词:智能分类;垃圾;设计
垃圾量很大,并且是连续产生的,有利用潜力的同时也是有污染危害的。所以对垃圾的合理分类进行处理对于垃圾的减量化、资源化和无害化都有非常重大的意义,同时有利环境的保护,符合我国的可持续发展的战略规划。
智能垃圾分类系统创新性的定义
日常中,每个类别的垃圾往往包含了各式各样的内容,仅凭经验,人们在分类投放时难免出现偏差。通过应用智能垃圾分类系统就可以很好的解决这个问题。智能分类系统符合当今大数据时代,具有一定的研究理论价值。
为了提升土地资源的利用价值,降低垃圾处理的成本,更精确的完成对垃圾的分类,减少垃圾处理量和进行处理的设备量,具有一定的实际生活价值,符合当今可持续发展的潮流。
目前智能垃圾分类系统关键性技术及设计
[1]20世纪80年代中期研制的Utah/MIT灵巧手,其外形与人手更接近。Utah/MIT灵巧手包括3个具有4自由度的手指和一个拇指,其几何尺寸与人手相似,每个模块由腱、滑轮传动系统驱动。其中,触摸传感器和控制器之间的数据通道是双向的,因此可以获得数据,并且可以根据数据融合方法选择触摸传感器。触觉传感器必须与其他类型的传感器融合在一起,以便稳定,快速和可靠地抓住物体。
本文设计的一种基于Arduino的智能垃圾分类系统在灵巧手机械的基础上进行改进通过使用其机械手上的两根柔软手指挤压物体以完成抓取,机械手指上安装由压力传感器模块,可以简易的检测垃圾的刚体信号,与数据库进行比对,通过机械手的抓取功能将垃圾分类进入不同的类型区域。
[2]机械手一般由三部分组成:执行器,驱动机构,控制系统和检测装置。手部是需要抓取的部分,根据抓取物体的形状、大小、重量、材料和操作要求有多种形式,如加持型、托持型和吸附型等。为了在空间中的任何位置和方向上抓取物体,必须需要6个自由度。自由度是关键的数据在设计中。
选择Arduino为主要控制模块并在Arduino的基础上进行开发。通过信号接收模块接受来自柔性机械手上的压力传感器的信号,经过控制模块进行分析处理以后进行主要的分类活动。
在分选过程中,机器会扫描物体并通过传感器测量物体的尺寸。使用其机械手上的两根柔软手指挤压物体以完成抓取,而手指上的压力传感器能够测量抓住物体所需要的力,并通过信号接收模块接受来自柔性机械手上的压力传感器的信号,将扫描结果与压力传感器获得的各种材料数据相互对比匹配,分辨出物体材质后,机器会将其投入正确的垃圾种类区,完成垃圾分类,并且由于是软体抓手缘故,它可以更轻松的抓起各种形状不规则的物品,从而实现更多种类的分类任务。
智能垃圾分类系统整体实现
系统整体的实现
此智能垃圾分类系统所实现的功能包括:垃圾箱体的自动开关门、系统自动识别垃圾并分类、多个传感器相结合实现整体功能、大数据分析等功能。实现以上这些功能可以使用户方便投放垃圾,将二者初步隔离,进行简易的垃圾分类。该设计使用Arduino作为主要的控制模块,并在Arduino的基础上进行开发。
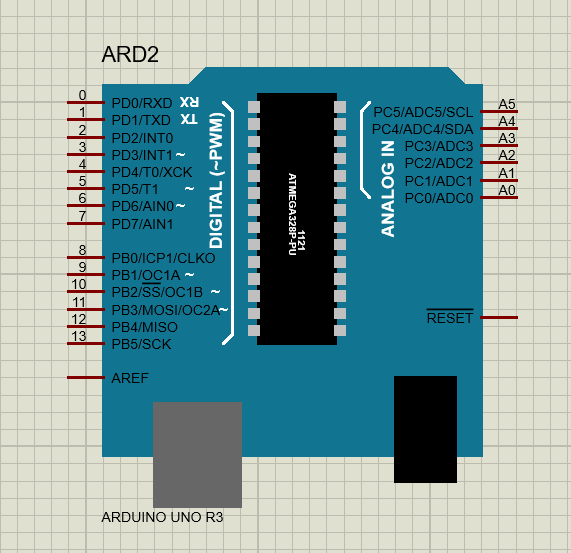
单片机最小系统
Arduino简介
智能垃圾分类系统的主要控制系统选在Arduino的基础上进行改进和开发,Ariduino可以通过各种各样的传感器来感知环境,由A/D转换让单片机发出指令,通过控制其他装置来反馈和影响环境。硬件部分用来做电路连接的Arduino电路板,另一个Arduino IDE作为计算机中的程序开发环境。板子上的微控制器可以通过Arduino编程语言进行编程,并编译成二进制文件。
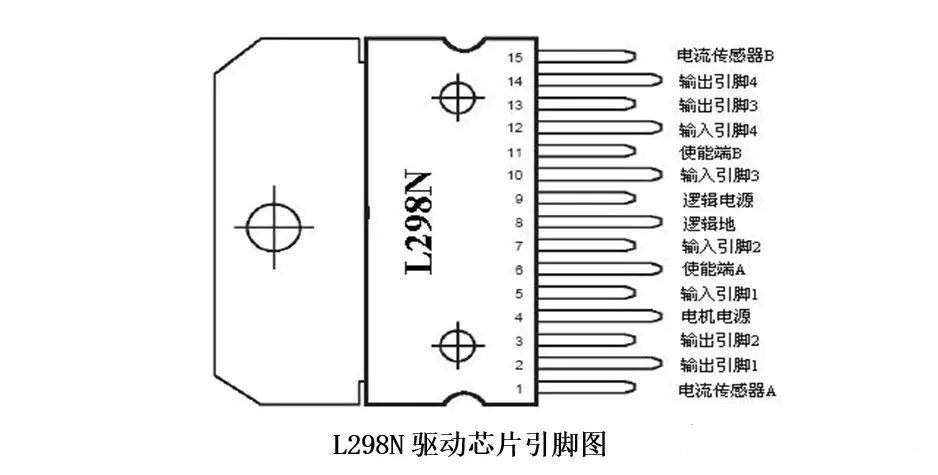
电机驱动模块
在电机驱动方面,选择了L298N电机驱动器。L298N是可以接受高电压的电机驱动器,直流电机和步进电机均可被驱动。一片驱动芯片可以控制两个直流减速电机做不同动作,在6V到46V的电压范围内提供2A电流,并且具有过热自断和反馈检测的功能。L298N可以直接控制电机,并通过主控制芯片的I/O输入设置其控制级别,以驱动电机驱动。
称重模块的设计
投入箱体的垃圾重量可以实时送到称重调控器上转化成数据,实现对垃圾的精准分析。
电源模块的设计
稳压电路的功能是确保电路的正常运行。如果电压低于稳定电压,电路将无法正常工作,而高于稳定电压的电压可能会损坏电路或保护电路。稳压电路图如图所示。
电源模块主要用了稳压芯片L7805CV,1脚和3脚分别是输入端和输出端,2脚接地。无需外接元件;内部热过载保护;输出电流可达100mA;内部短路电流限制就是L7805CV的四大特点。

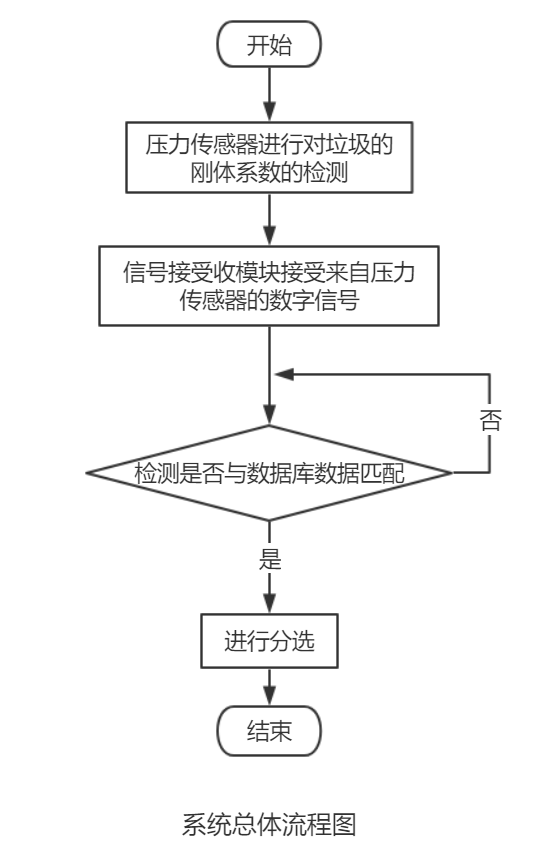
系统软件的实现
系统程序整体流程图
电机结构框图

智能垃圾分类系统的工作流程
结论
经过努力查阅大量单片机、电机控制、红外线传感、压力传感器等方面的资料和参考文献。通过多次实验实践,将智能垃圾分类系统各个模块调试完善,对系统进行了运行和完善,并撰写了总结报告和论文。
参考文献
[1][1] 高国富,谢少荣,罗均.机器人传感器技术及应用[J].北京:化学工业出版社,2005.7
[2][2] 陈黄祥.智能机器人[J].北京:化学工业出版社,2012.8

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



