1.金华职业技术学院,浙江金华 321007; 2.浙江大学 生物系统工程与食品科学学院,浙江杭州 310058; 3.浙江睿耘科技有限公司,浙江杭州 310053; 4.西部电子商务股份有限公司,宁夏银川 750002
摘要: 本研究针对农机管理实时数据少、农机实时作业监管困难、服务信息不对称等问题,首先提出专业化远程管理平台设计时应具有五大原则:专业化、标准化、云平台、模块化以及开放性。基于这些原则,本研究设计了基于大田作业智能传感技术、物联网技术、定位技术、遥感技术和地理信息系统的可定制化的通用农机远程智能管理平台。平台分别为各级政府管理部门、农机合作社、农机手、农户设计并实现了基于WebGIS 的农机信息库及农机位置服务、农机作业实时监测与管理、农田基础信息管理、田间作物基本信息管理、农机调度管理、农机补贴管理、农机作业订单管理等多个实用模块。研究着重分析了在当前的技术背景下,平台部分关键技术的实现方法,包括采用低精度GNSS定位系统前提下的作业面积的计算方法、GNSS定位数据处理过程中的数据问题分析、农机调度算法、作业传感器信息的集成等,并提出了以地块为核心的管理平台建设思路;同时提出农机作业管理平台将逐步从简单作业管理转向大田农机综合管理。本平台对同类型管理平台的研发具有一定的参考与借鉴作用。
关键词: 传感技术;数据融合;管理平台;大田农业机械;物联网;GNSS
中图分类号: S24;S-3 文献标志码: A 文章编号: 202004-SA006
引文格式:朱登胜, 方慧, 胡韶明, 王文权, 周延锁, 王红艳, 刘飞, 何勇. 农机远程智能管理平台研发及其应用[J]. 智慧农业(中英文), 2020, 2 (2): 67-81.
Citation:ZHU Dengsheng, FANG Hui, HU Shaoming, WANG Wenquan, ZHOU Yansuo, WANG Hongyan, LIU Fei, HE Yong. Development and application of an intelligent remote management platform for agricultural machinery[J]. Smart Agriculture, 2020, 2 (2): 67-81.
1 引 言
实现农业机械化是提高中国农业发展水平的重要环节,对建设中国特色现代化农业具有重要支撑作用。近几年随着科学技术的飞速发展,农业机械不断向专业化、高效化、自动化、信息化与智能化的方向快速发展。其信息化与智能化不仅体现在农机具作业实施过程中,也体现在农业及农机作业管理中。针对政府农业作业监管困难、农忙时间农机资源分配难以协调、农机实际运行效率难以度量等问题,利用物联网技术,在农机上安装位置传感器、作业传感器等传感器,建立农机智能管理平台,从而充分发挥各种农业机械的效率与作用,更好地实现农业精细作业以及节能环保的要求是当下大田农事管理研究的热点之一。
虽然国外也有农机作业及管理相关平台的建设,但在技术完整性方面还有待进一步提高。如Wang等[1]建立了一个基于无线网络的数据存储服务器,用于存储来自摘棉机、智能农喷洒装置和变量施肥装置的数据。类似的商业化农机管理平台还有一些大型农机厂家的专用平台,如美国John Deere公司的FarmSightTM农业管理平台、美国Trimble公司的Trimble Ag Software农场管理平台等。这类管理系统在技术上主要解决了大田中部分作业相关信息的获取,在应用范围上,主要负责特定农场范围内大田农业作业相关的各种数据的获取与采集,通常可针对特定地区完成历年各类数据积累与分析。从实际应用角度,国外农机管理平台通常是特定大型农机企业为了更好地使用农机而开发的农机专用平台,而不是从政府、合作社、农户全方位考虑的不同需求的平台,平台的通用性不强,不适合在中国广泛应用。
中国农机行业在经历了约十五年的快速发展期之后,正处于从传统农机向现代农机转型的关键时期。在国家高技术研究发展计划(“863”计划)、科学技术部“十三五”国家重点研发计划等重大专项和地方政府的支持下,农业装备智能化、农业系统远程监控及农业信息化等方面获得了较快发展。在远程深松作业监测与收获作业统计方面,刘碧贞等[2]研发了基于北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)和全球定位系统(Global Positioning System,GPS)的谷物收割机作业综合管理系统,实现了谷物收割机作业数据(包括谷物产量测量、收割面积和收割机作业地理位置信息等)的采集。在农机管理及农机作业管理方面的管理平台领域,刘振宇和梁建平
[3]研发了基于BDS的农机调度与作业平台,实现了农机调度和作业监控管理的全流程服务,广泛应用于百余家农机合作社的6000余台农机。叶文超等[4]和张俊艺等[5]研发了基于共享农机模式的农机调度与管理平台,拓宽了农场主和机手之间的信息共享渠道,实现了农机信息采集与智能调度。刘娜[6]引入智慧城市快递系统研发了农机信息化综合服务平台,实现了农田地块规划、农机导航定位、农机调度分配及信息反馈等综合智能化服务。王春山等[7]研发了以农户和机手为服务对象的智慧农机调配管理平台,集成了农机智能调度和农机作业面积测量算法,提高了机手收益并减少了作业面积测量成本。姚强等[8]开发了农业机械远程管理信息系统,实现了机手、农机信息在线远程管理和农机维修保养在线记录功能。现阶段农机管理及农机作业管理平台通常为政府、农户或农机作业的某个方面的管理服务[9,10],缺少能够为农户、合作社、农机企业和政府协同服务,并适用于各种不同农机作业的更加灵活的管理系统。
针对上述研究现状及农机实时作业监管困难、农机作业信息收集难、服务信息不对称等问题,改善农机及农机作业管理方法、改进农机作业信息流通方式、完善农机作业评价方法与体系,提高农机作业效率和使用效益、为农户/农机手/农机合作社/农机企业/农机管理人员提供全方位的服务体系的需要非常迫切。本研究通过集成大田作业智能传感技术、物联网技术和全球导航卫星系统(Global Navigation Satellite System,GNSS),并依托遥感技术(Remote Sensing,RS)和地理信息系统(Geographic Information System,GIS),研发了一种较为通用的大田智能管理app及网络平台,实现对大田作物的智能化管理。
2 平台总体设计
2.1 基本原则
大田农机作业管理平台的主要设计目标是实现所有大田农机作业相关信息的管理,其服务对象为所有与农机作业有关的人员,包括政府各级相关管理部门、农机合作社、农机手、农户,以及农机企业等。作为一个专业农机作业管理服务平台,其设计遵循以下几方面的原则。
①专业化:平台所管理的参数应包括农机作业相关参数。
②标准化:平台使用的数据采集终端应采用标准化的通讯协议,如TCP/IP等。目前农机作业参数还没有通用标准发布,可以建立最小化的核心数据集,以保证通用性。另外,平台应能通过标准化的交互协议,与其它同类型的平台交互通讯,以便数据共享。
③云平台:平台应采用云平台形式提供服务,通过大型云服务提供商,快速扩展存储空间与流量,支持农机平台上线量从数百台至数万台的平稳过渡。
④模块化:通过模块化的设计,可灵活组合、定制模块功能,使集成平台能无缝支持省、市、区(县)模式的现有农机管理机制,并能支持不同管理部门、不同角色的个性化定制。
⑤开放性:平台应设计开放、通用性强的通讯协议,可以对接多种实时农机传感装置。深松传感器和植保喷施流量、压力传感器是最为常用的农机作业传感器,平台通过通用的数据协议应能支持还未出现的不同类型、不同品牌的传感信号。
2.2 基本功能模块设计
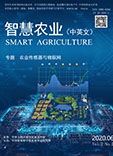
作为大田农机作业管理平台,首先完成与农机作业过程有关的信息采集与管理,这些信息最终用于为农户、农机手、合作社、农机企业及农机管理人员提供针对性的服务。因此,本平台在整体设计上,首先考虑了不同农机类型和不同农业作业类型信息采集方法及传感原理的差异,并根据不同类型的农机相关从业人员的实际需求,梳理平台功能。平台框架如图1所示。
图 1 农机智能管理平台的系统框架图
Fig. 1 Intelligent remote management system for agricultural machinery framework diagram
平台在架构上分为四层,基础设施层主要代表了平台所需的各种硬件组成部分,包括了各种位置和作业传感器及数据传输终端、服务器及基础网络配备等。通过基础硬件设备获取各种数据之后,经数据资源库层完成数据的管理,包括作业相关的动态数据、农机及作业管理相关的静态数据等。平台的系统功能主要在业务逻辑层中实现,该层在基础的软件操作系统及数据管理接口、地理信息系统接口等支持之下。本研究重点对所得到的农机管理及作业管理相关的数据进行针对性功能开发,包括农田管理、农机基础信息管理、作物管理、农机位置管理、作业信息动静态管理、补贴管理、订单管理以及农机故障实时诊断等;其中,农机故障实时诊断通过读取农机实时故障码来实现,需要与农机厂家进行合作开发。最顶层的用户层描述了平台的服务对象是所有与农机应用生命周期有关的人员,包括政府管理部门、农机合作社、农机手、农户、农机企业等。平台较为核心的模块功能如下所述。
(1)农机信息库及农机位置服务。农机信息库分为农机静态基础信息库和农机作业动态信息库。静态信息库管理基本农机基础数据,包括农机名称、作业幅宽、生产厂家、功率等,并按农机分类标准进行分类管理。而对农机作业过程、农机作业供需信息等动态信息,本研究采用农机动态服务库记录并管理,建立了基于WebGIS的农机位置服务、农机作业轨迹服务、农机作业订单服务、农机调度服务等动态服务体系。服务体系分别采用手机app与Web端两种方式体现,为方便用户层即时管理并掌握农机静态信息与动态信息,设计了订单系统,以解决农忙时期农机应用紧张、农机服务需求信息不对称问题。
(2)农机作业实时监测。针对农机作业信息难记录、农机作业质量难监管的问题,对部分典型的农机作业,如插秧作业、打药作业、施肥作业、收获作业、烘干过程等配备专业传感设备,实现作业过程中关键参数进行测量与记录。并设计了具有开放性的数据协议,支持任何一种潜在的农机作业传感数据的实时接入。可根据不同的要求,支持农机作业图像或视频信息的实时传送。通过对农机作业的监测,逐步研发科学的农机作业质量评价方法。
(3)农机作业管理。针对海量的农机实时位置信息与传感数据信息,在远程采集所有农机信息及农机作业有关信息(如农机位置、作业状态、作业面积、作业实时图像、作业质量等)后,可依据得到的数据,进行日、周、月的农机作业统计、作业回顾等。针对农机服务与管理特点,设计大数据分析模块用于分析农机作业效率、作业时间预测等。将数据分析与处理模块以不同的形式嵌入到不同用户版本的手机app及Web管理平台中,以协助有关农机人员在各种应用场景下的管理工作,为管理人员提供管理决策的依据。
(4)农田信息管理。农田信息管理采用基于WebGIS控件的手机app及Web端,实现更便捷的农田信息管理。首先由使用者在手机app或Web端将地块信息的新建、编辑数据保存在数据库中。平台管理人员可以在平台上看到自己所管辖区域内的所有地块及地块信息。要显示自己所管辖区域内所有的地块,平台管理人员需点击地块分布,可以依据地块名字的关键字进行地块搜索,可以了解该地块的编号、名称、面积、负责人等相关信息。上述农田信息即为系统管理作业的分布底图。
在本平台研发过程中,研究人员注意到地块在大型合作社管理中的重要性,强化了地块及农田管理功能,并将系统的核心由基于农机作业为线索的管理转向以地块为核心的管理。地块是农场中变化最少的一个核心,所有的作业环节都发生在地块上,农机所有田间行为及其结果,都可以通过地块进行关联。因此,地块逐步成为系统的核心部分,将所有的农机作业信息、作物生长信息进行组合。
(5)订单信息管理。农机管理系统中的订单是指有作业需求但没有农机的农户通过平台发布作业需求,成为农机作业订单,农机作业服务机构可以通过平台完成订单任务。订单管理可以查询订单日期、作业类型、预估金额、订单状态等信息,并以地区、作业类型、订单状态、用户名或者合作社等条件筛选需要查找的订单。订单管理为农忙时期的农户、农机手、管理人员的信息不对称问题提供了解决方案。
3 关键技术研究
和大田作物直接相关的作业主要有耕整地作业、种植作业、施肥作业、植保作业和收获作业等,如果为农场全过程管理考虑,还可以增加烘干作业的管理。其中烘干作业是静态位置的作业,其它作业都是大田动态作业,作业信息中农机在某时间点的位置信息是最基础的信息。在位置信息的基础上,根据不同的作业需求可采集不同的信息,如插秧作业过程中的行距、粮食收获作业过程中的含水量、深松过程中的耕地深度等,且不同类型的信息采集需要借助不同的传感器来实现。智能农机管理平台中的传感技术包括位置传感、农机作业状态传感及农机作业环境传感等。其中,农机作业监测传感器是目前农机研究领域的热点之一。智能农机管理平台应在功能接口上能够支持多种不同的传感器及其数据管理。以下就平台设计过程中的若干关键技术加以说明。
3.1 农机位置信息的获取与分析
农机作业管理系统中大多采用米级定位精度的GNSS。米级定位精度对农机作业管理会产生一定的影响,本研究主要分析有关作业面积计算与精度分析、GNSS在机库内未正常关机判断等问题。农机作业面积计算是作业管理平台的主要功能之一,通常采用GNSS实现农机定位并进行计算。如果采用基于实时动态载波相位差分(Real Time Kinematic,RTK)技术的GNSS,可以得到厘米级的高精度定位结果,没有累积误差。该技术非常适用于农机自动导航过程[11,12],但由于价格较高,无法大量地用于普通的农机作业管理中。
3.1.1 基于栅格法的面积计算
本研究采用了栅格法完成地块的面积计算,栅格的大小决定了面积计算的精度。算法的具体思路:首先将农机作业经纬度信息转为平面坐标;根据地块所在的范围,确定地块所在的栅格空间,将相邻两点的轨迹线结合农机的幅宽,并标记被幅宽覆盖过的栅格,最后累计所有被覆盖过的栅格,作为作业面积。
基于栅格的面积计算算法精度由栅格大小、GNSS定位系统的精度决定,且通过标记某个栅格被重复记录的次数,找到重复作业的区域,使作业面积不会重复计算,有利于打药等作业的重复区域的判别,且可以较为便捷地扣除并标记出没有被作业覆盖的区域。
3.1.2 GNSS精度引起的农机作业面积估算误差分析
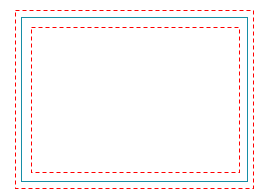
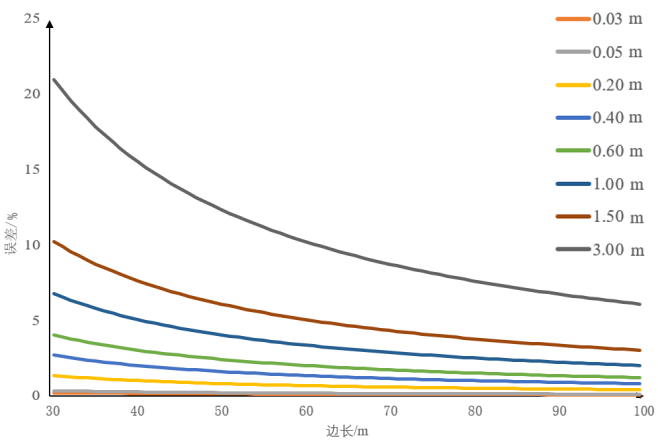
由于米级GNSS精度较低,在农机作业面积测量与估算时(图2(a)),假设用一个GNSS接收机测量一个边长为A的正方型地块,由于GNSS的误差,最后的GNSS轨迹落在虚框所在的区域,仅以外侧虚框(假设边长为B)为例进行分析,如公式(1)。
 (1)
(1)
其中,E为最大面积测量误差率,%。
| (a) 地块边界及误差范围示意图 |
(b) 面积测量最大误差率变化 |
图2 不同边长地块在不同精度GNSS信号下的面积测量误差率变化
Fig. 2 Area measurement errors rate of different side length parcels under different accuracy GNSS signals
假设地块边界在30~100 m范围变化,不同的GNSS信号误差分为:0.03、0.05、0.2、0.4、0.6、1、1.5和3 m,可以由公式(1)计算得到最终的最大面积误差与地块边长和GNSS误差之间的关系。大田测量时,通常要求测试误差小于5%。由图2可见,当采用RTK精度等级的GNSS时,面积精度非常高,可以在任何大小的地块上做精确地测量。而要达到5%的精度,所用的GNSS的精度应达到0.4 m,大部分的普通农机上的定位系统还无法达到这样的精度。采用目前应用最广的GNSS米级定位系统,如以小块的正方型地块为例,被测地块边长应在40 m以上,总面积约为1600 m2以上时,面积测量误差可小于5%。如果采用的1.5 m误差的GNSS信号,则需在大于3600 m2以上的地块面积测量中,取得较为稳定的结果。
3.1.3 散乱点集判别算法
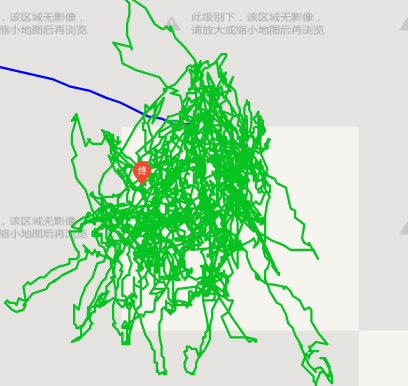
GNSS信号的精度受环境影响较大,在开阔的农田中,米级精度GNSS系统结果较为稳定,可以达到农机作业一般管理要求。但是实际使用中,有时发生农机停在机库,农户忘记关闭农机发动机的现象。机库中的GNSS仍在工作,由于机库遮挡的影响,往往产生大量的飘移状态的位置点,如图3(a)所示。这样的点集通常最后形成一组时间间隔长、轨迹占地面积很大的散乱点集,该点集占有地面积有时大于666.66 m2,干扰了正常作业面积自动判断与计算。因此,本研究提出了一种散乱点集自动判断算法,用于区别正常的农机作业轨迹图(3(b)),算法主要原理如下。
| (a) 在机库飘移GNSS点集 |
(b) 正常的农机作业轨迹 |
图3 机库漂移与正常的农机作业轨迹对比图
Fig. 3 Comparison chart of hangar drift and normal agricultural machinery operation track
由于在本平台中已计算得到了所有作业轨迹点的斜率,并要求算法尽可能简洁,易于大规模数据处理。观察图3飘移点集与作业轨迹,可以发现漂移点集的相邻两点的斜率变化范围较大,而面积相对正常作业面积始终偏小。平台目前中的作业主要为耕地、插秧、收获、施肥及植保喷药作业,正常的作业轨迹为直线往复或绕行。分析图3数据,正常农机作业形成的往复式作业轨迹通常由很多平行线组成,只在地头转弯处有较大的斜率变化。绕行法也最终会生成在方向上相互垂直的二组平行直线,而散乱的GNSS点轨迹无规律,相邻两点的斜率变动大且无规律。散乱点中不会出现多条正常作业所生成的平行线。因此,算法的核心是判断点集中是否有多条相互平行或垂直的直线。
常用的直线拟合方法有Hough变换及其变形[13,14]、最小二乘法、粒子群算法[15]、随机一致性采样法等。其中,随机一致性采样法对含有较多噪声点的农机作业轨迹直线拟合较果较好。但这类算法最终会针对所有输入点得到一条拟合直线。由于在农机正常作业点集中通常包含多条作业直线,且这类算法通常忽视点集的时间序列特点,因此,常规的直线拟合算法不合适用于机库散乱点的判断问题。基于此,本研究提出了一种便捷的散乱点判别算法,算法步骤如下。
①点集去重复。
②利用公式(2)计算被测点集的所有点的斜率。
 (2)
(2)
其中, 为投影后的纬度坐标,m;
为投影后的纬度坐标,m; 为投影后的经度坐标,m。
为投影后的经度坐标,m。
③由斜率计算出前后相邻两个点的角度值Ti。
④对于点集N中的每个点,当前点Ni为中心,求出Ni前后5个点范围内,共11个点为一个窗口大小的角度均值;将11个点的窗口顺序移动轨迹点集,得到每个点为中心的角度均值Ai。
⑤求每个点的瞬时角度Ti与角度均值Ai的偏差Ei,表现该点与该点处拟合直线斜率的瞬时角度偏差。
⑥从1个点开始,判断是否存在时间连续的C个以上的点Ei值满足直线要求阈值VE。
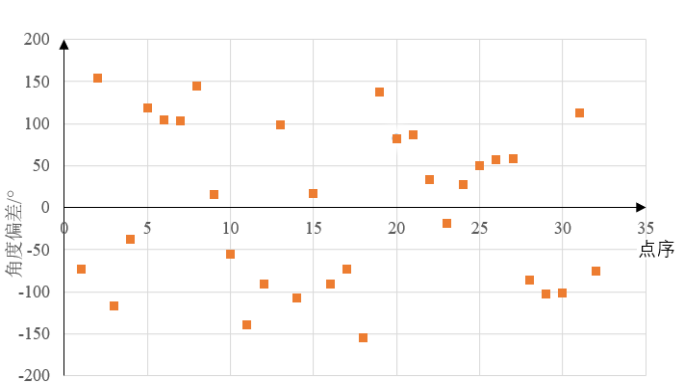
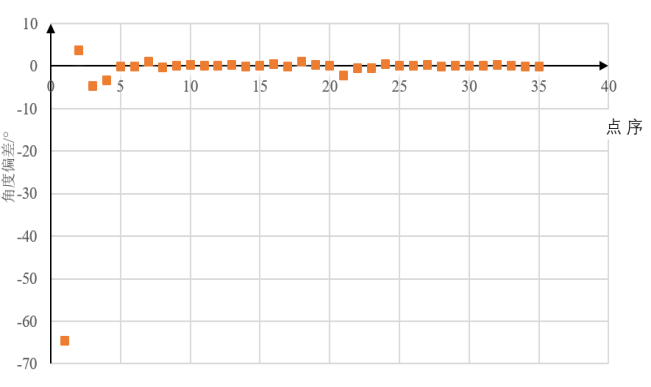
对正常人工驾驶的轨迹的作业路线进行分析,可以发现正常人工驾驶的农机作业轨迹的角度偏差通常小于10°,偶尔一些跳点角度偏差达到15°以内,而在转弯处Ei明显增大,这也与人工驾驶及采用低精度的GNSS相符合。因此,可以在直线部分找到连续的小于10°的Ei,而在散乱点集中,该Ei值的变化较大,无明显规律。图4显示了散乱点及直线部分的斜率偏差指标(换算成角度)分布。
| (a) 散乱点角度偏差 | (b) 田间部分从转弯到直线的轨迹角度偏差变化 |
图4 散乱点及田间部分的角度偏差示意图
Fig. 4 Schematic diagram of the angular deviation of scattered points and field parts
由图4(a)可见,散乱点的总体角度偏差大,而田间直线部分(图4(b))角度偏差较小。基本在10°以内。
上述算法主要验证了是否可以在点集中找到多条相似斜率的连续直线段,即使是采用普通米级精度的GNSS信号,也可以过滤因机库遮挡而生成的大量漂移点。对斜率的进一步分析与计算可以得到更多有关作业轨迹的信息。如果农机停在树下或其它干扰物下,也可以用该方法进行计算。而如果农机是停在较为开阔的农田中,由GNSS系统的精度可确保不会引起过大的漂移而干扰正常的面积计算。
3.2 农机作业调度
对有较大农机保有量的农场,还应提供适用于大量农机作业管理的一些算法,如农机调度算法[16-21]。
农机调度的概念在现在大部分的农机管理平台中,大都设计为:操作人员主动观察现在的农机作业情况,通过电话、微信等人工的方式,进行农机的宏观调度。本系统的订单模块与其类似。
本研究所提的农机调度,是指已知当前的作业需求、可得到的农机数量等参数,通过建立一种带时间窗农机调度模型,来自动安排一个合作社内全部的作业顺序及农机与作业的配对,在模型所需数据可以得到的前提下,可用于部分辅助农机调度决策的生成。
本研究的带时间窗农机调度模型针对以农机合作社为代表的面向订单的典型农机服务模式,由作业的订单产生了调度的需求。由现有的农田位置、农机的功率、作业效率等产生现在的可分配的资源,通过分析农田作业点、农机库及农机、空间、时间等多个影响因素,结合现有车辆调度问题的研究,建立一种基于遗传算法[22]的带时间窗农机调度模型。在遗传算法框架中,对染色体进行合适编码,进化过程包括精英保留、选择、交叉、变异和个体优化等步骤,设计多个变异算子和邻域搜索算子。模型适用于以合作社为主导的农机调度模式和面向作业订单的农机调度模式[23],算法主要阶段性步骤如下。
①将车库中的农机按照作业能力由高到低排序。
②逐一对每一台农机的调度路径进行规划,开始一条空路径 。
。
③在所有未规划的任务点中,随机选择一个任务点作为种子,将它插入到路径 。
。
④如果所有任务点都已规划好,跳到第⑦步;
否则,如果当前路径 不满足四大可行性评判准则(时间窗可行性准则、农机作业匹配准则、最大资源限制准则、调度路径完整性准则),则跳至第⑥步;
否则,对于每一个未规划的任务点,找出该任务点在 的最佳插入位置。
⑤如果没有可行的位置用于插入,跳至第⑥步。选择最佳任务点,将其插入到路径 ,更新车辆状态。跳至第④步。
⑥开启一条新路径 ,
, ,跳到第③步。
,跳到第③步。
⑦返回当前解。
主要技术路线图如5所示。
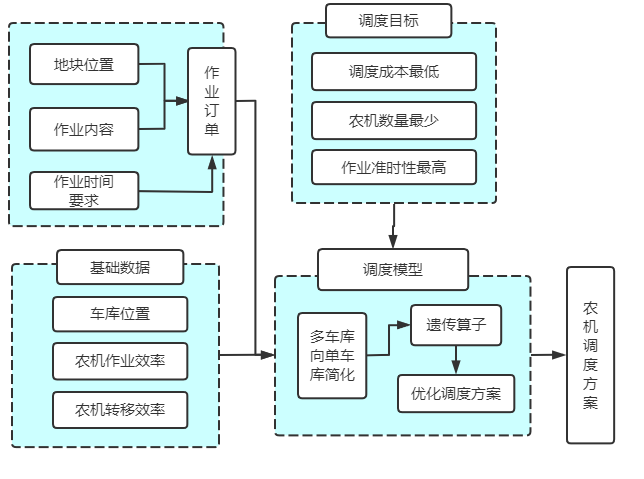
图5 农机调度模块技术路线简图
Fig. 5 Technical route of agricultural machinery dispatching module
由图5可知,针对合作社的农机调度算法,主要考虑了单个或多个车库条件下,首先确定车库的位置、地块的位置及每个地块上的作业需求,生成一个作业需求表。针对这个作业需求表,设计调度目标:如调度成本最低、完成作业计划所需要的农机数量最少、或完成作业的时间要求最短等三个方面。针对某一个调度目标,设计相应的目标函数,利用遗传算法优化农机作业过程的总成本最优,其中要考虑农机在不同地块上作业的时间成本、油耗成本、转移成本等,最终为管理人员提供作业顺序建议方案。
对于应用者来说,需要录入较多的基础数据,如农机每种作业的作业效率、地块的位置、订单的详细信息、农机每种作业的平均油耗数据等,因此,模型的全面应用还需要经过一段时间的数据积累。
3.3 农机作业传感器信息的集成
丰富的农机作业传感信息是农机作业管理平台与一般的车联网系统的主要区别之一,也是将来大田农机大数据服务系统的基础。目前,由于国内农机领域的传感技术较为落后,能直接集成的传感器较少,最为常见的是深松作业传感器及部分喷施作业信息的集成。
3.3.1 深松传感技术及数据集成
深松传感技术的最终目标是精确测量出深松深度,深松传感也是目前已有较大范围应用的一种农机作业检测技术,可基于不同的深松检测原理进行操作。
本平台采用的是自行研发的机械式仿形深松深度测量法,对测量臂的外形进行了建模运算。在测量时,当测量臂接触地面并滑动转过一定角度时,角度传感器实时测出角度值,通过设定的比例系数得出农具下降的高度,由此测出耕深。该装置已获得了专利授权(ZL 2019209013772)。但从平台的角度来说,平台也可以集成多种不同的深松传感器数据。
因此,从平台数据集成的角度,主要的关注点在于:传感器将一个与角度有关的电信号转为深度变化信息后,平台需要记录随时间、经度、纬度变化的深度信息,并与作业及农机基础数据相关联。因此,集成的动态数据主要是时间、经度、纬度和深度。在数据处理上,由于实际的农田中,土块高低有一定的变化,所以需要在数据处理上进行平滑处理,如移动平滑、中位值平均算法、S-G(Savitzky-Golay)卷积平滑、最小二乘拟合等数据平滑算法。
3.3.2 变量喷施技术及数据集成
变量喷施是现代农业中的一项基础作业,通过变量喷施作业实现作物的按需作业,在保证喷施效果的同时,减少环境污染与肥料或农药的浪费。本平台集成的变量作业技术,实际使用的是基于GNSS定位系统根据作业速度快慢调整作业量、控制压力或流量。流量的调整可以通过调节回流量,保证系统中的流量大小,具体能够实现作业速度快则喷量自动增大,作业速度慢则喷量自动减少,作业停止则停止喷施。
由于大田喷施作业控制机构复杂,通常包括多个区段,每个区段均可控制开关和流量,在系统集成方面也增加了一定的复杂性,本系统除了位置信息外的变量喷施部分参数如表1所示。
表1 大田喷施作业参数
Table 1 Field spraying operation parameters
描述 | |
喷雾类型 | 分为液力喷雾、静电喷雾、离心力喷雾 |
药液类型 | 分为水基、油基 |
区段数 | 3,5,7,9等区段个数值 |
区段长度/cm | n为区段数量,每个字节顺序表示区段长度,范围1~n |
喷头编号 | 正在作业喷头的编号值 |
平均药量/(L·m-2) | 一次作业过程的平均药量 |
作业总流量/L | 一次作业过程的总流量 |
作业总行程/m | 一次作业过程中喷洒的总行程 |
作业总面积/m2 | 一次作业过程总的覆盖面积 |
与其它农机管理系统不同,本研究针对主要的农机作业类型,如插秧、收获、深松、打药等,设计了不同的作业管理单元。系统通过自动识别作业类型,自动进入相应的作业管理单元。目前主要涉及种植、收获、植保、耕地等几大主要的作业管理,用户只需了解农机类型,即可自动进入对应类型的作业管理,无需人工作业选择。
3.3.3 农机数据通讯终端研制
针对农机数据的远程通讯问题,本平台设计了专用的农机数据通讯终端。为配合如前所述的多种传感器数据采集,通讯终端需要支持多种常用的农机数据接口CAN/RS232/RS485,以便于汇集各种农机定位、状态和作业信息。其中,控制器局域网络(Controller Area Network,CAN)是ISO国际标准化的串行通信协议,RS232是数据终端设备和数据通信设备之间串行二进制数据交换接口技术标准,RS485采用平衡发送和差分接收方式实现通信。采用TCP/IP协议,通过GSM/GPRS/4G移动通讯模块实时将定位、状态、作业传感信息发送到远端云平台。
本平台研制了三种不同类型的农机数据采集终端,分别为仅支持GNSS信号的2G终端、支持GNSS和485接口传感器的2G终端、支持GNSS和485/CAN接口传感器的4G终端三种。分别如图6所示。

图6 三种不同复杂度的平台终端
Fig. 6 Three different complexity of platform terminals
这三种终端传感器分别从简单的定位数据到多传感器支持,从2G到4G信号支持,应用于不同需求的场合。如有部分农机作业暂时缺少适合的传感器,则只需要GNSS定位数据。目前大部分传感器如图像传感器采用485接口。由于CAN是一些中大型农机公司常用的数据接口,应会在未来的几年中逐步推广。不同的接口支持使得平台可以随着传感器技术的进步,逐步增加平台中的作业数据类型与数据来源。
无论采用哪一种终端,本平台设计了基于透传的数据通讯协议,完成终端与平台的通讯,并同时可以外接不同类型的传感器。为满足不同类型传感器的对接,终端采用了传感器信号的透传模式,平台只需要在服务器端做对应的数据解析,任何类型的传感器均可接入平台。
另外,当出现大量终端同时上线对接到平台时,平台在策略上采用了多服务器自动均衡用户量的做法,可以随着用户量的增加而增加服务器数量,并对服务器做好负载均衡,以满足农忙时期大量终端同时上线的要求。
图7为农机终端上线过程、终端与农机作业传感器、终端与农机通讯服务器的一部分交互过程。终端在通信服务器上通过各种验证之后,首先要定时向通信服务器发送心跳包,终端也会启动外设查找,即查看是否有农机作业传感器的挂接。如有,则外设通过终端与服务器通过透传建立联系,并同时启动位置服务。通讯服务器端定时查看终端是否仍在活跃状态,如果通讯超时,则结束与终端的连接。作业传感器的信息通过终端透传到服务器上,因此终端可以适应各种传感器的应用需求。
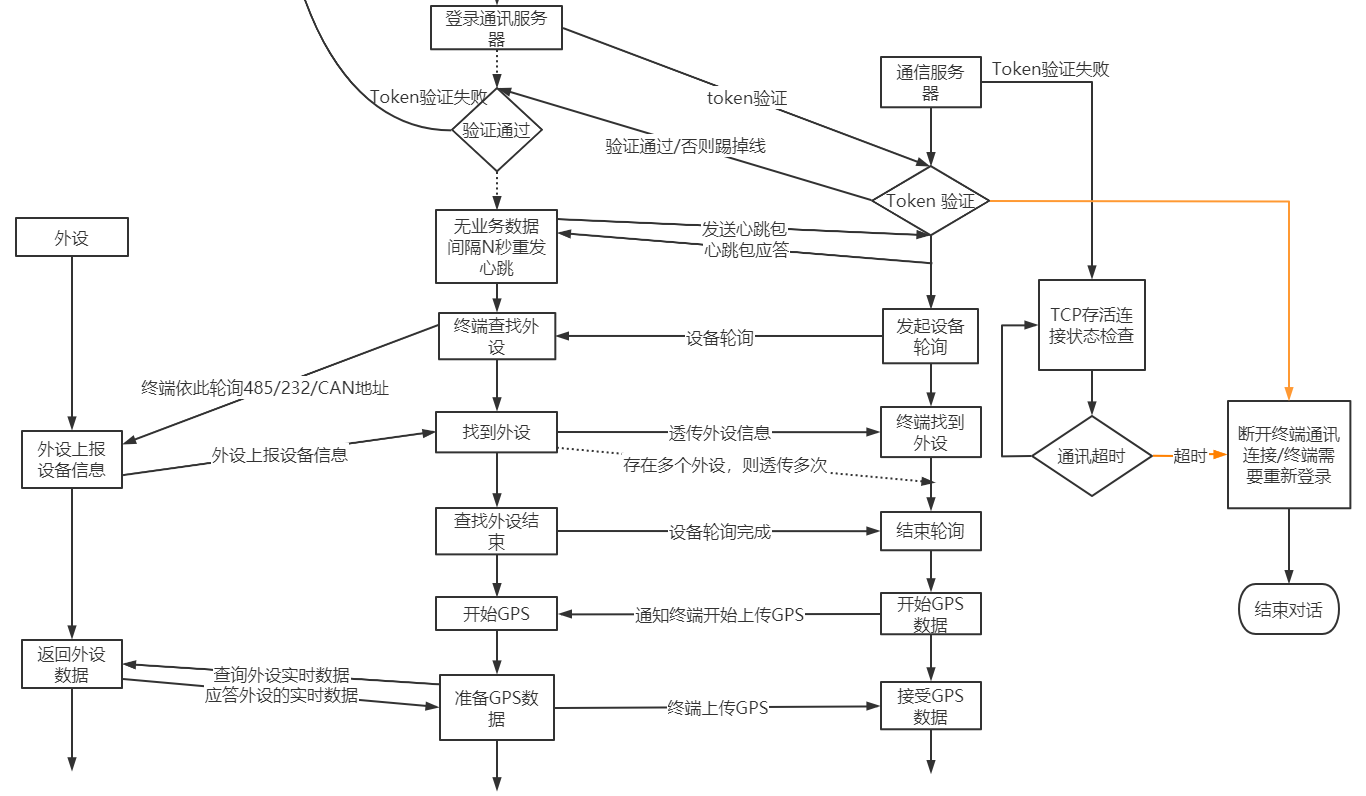
图7 终端上线及作业传感器信息获取部分流程
Fig. 7 Part acquisition process of terminal online and operation sensor information
4 系统的实施与应用
4.1 平台实现与部署
平台采用多服务器架构,通过负载均衡服务,为终端分配物联网通讯服务,完成通讯、存储与计算功能。平台分前端农机管理应用平台及系统支撑平台两部分:农机管理应用平台主要负责业务直接相关的功能模块,包括用户服务、作业管理服务、地块服务以及农机服务等。系统支撑平台主要负责消息总线、分布式缓存管理、服务发现等。系统的主要架构图如图8所示。
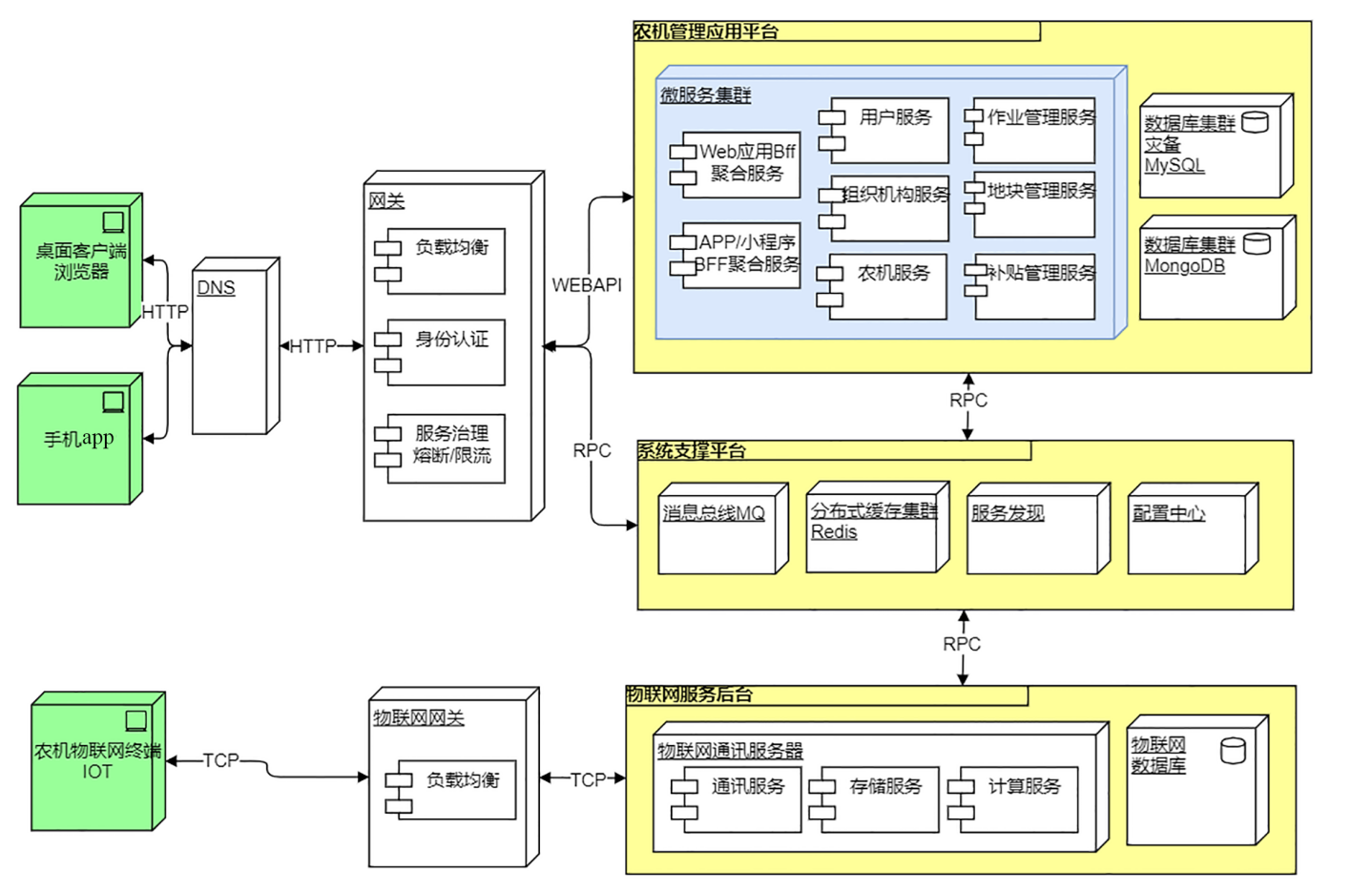
图8 系统部署示意图
Fig. 8 Diagram of system deployment
本平台采用微服务和云存储技术实现,通过SaaS(Software-as-a-Service,)为Web与app提供数据服务,并通过多种技术融合的数据存储体系保证数据稳定可靠和响应时效。其中,配置管理采用Consul技术,负载均衡采用Nginx技术,身份认证采用Identity server 4技术,基于Microsoft 最新开源跨平台的.net core为框架,支持在Windows和Linux服务器上部署,缓存技术为Redis,数据库兼容MySQL、MongoDB等。在GIS服务上,采用Openlayers技术,并支持天地图、高德、百度地图等国产数据,也同时支持谷歌地图以方便农机管理平台向海外推广应用。前端设计主要采用Angular、Reactor、Typescript、Javascript和Less等技术。移动端设计采用DCloud、MUI技术,同步支持安卓和iOS系统。
4.2 平台应用实例
本平台已在国内多地展开了应用,本研究以浙江省为例对系统运行和应用情况进行说明(图9)。
| (a) 省级管理平台 |
(b) 县级管理平台 |
图9 省级与县级管理平台系统界面图(以浙江省为例)
Fig. 9 Graphical user interface of provincial and county level management platform system(a case of Zhejiang province)
图9(a)为浙江省级的一个农机管理的政府端平台,可以通过平台看到全省农机分类、各地市实时在线的农机数量、各地市的累计作业面积等。图9(b)是定制的县级农机管理平台,除了管理县级的农机动态,还增加了部分当地管理人员较为关心的各类统计信息。政府管理人员看到的信息均来自于合作社、农场中的农机运行数据的汇集与统计。与现有的农机管理平台相比,本研究设计的平台为合作社做了增强型设计,平台合作社作为一线的农业管理层,有自己独特的Web管理端与功能比较全面的手机app。如图10所示。


(a)Web端 (b)手机app
图10 合作社农机管理平台Web端与手机app
Fig. 10 Cooperative agricultural machinery management platform of Web and mobile app
图10(a)在以遥感图像为底图的界面中,显示了该农场的所有地块,在合作社的各功能模块中,作业管理和作物管理都是基于地块的管理。本平台也设计了相关的app,并与Web端的功能设计基本接近,但app提供了更便捷的操作方式,可用手机完成所有的操作。基于合作社的Web端设计及相应的手机app中,用户可以完成合作社的人员管理、农田管理、农机基础信息管理、农机作业管理与作物管理,以及订单管理等多种日常农事管理,部分对政府较为重要的作业信息则与政府接口连通,以保证数据的准确性与可靠性。真正形成了合作社到政府管理的从分散到集中的管理模式。
5 结论与展望
本研究提出了一种综合性的农机作业管理系统,该系统针对农机管理、农田管理、农机作业管理脱节的问题,在同一个系统中,以农田管理为核心,支持农田地块、农机服务信息、农机作业信息的协同管理,把分散的农业设施、农田信息、农机服务需求信息和农机作业信息,以农田(地块)为核心,将所有信息连成统一的、互有因果的整体,形成农机作业、平台监管的新模式及流程,实现农机资源及农田资源的自动化、智能化、精准化与统一化的分析与管理。
然而,目前在农机作业上可使用的传感器十分有限,常见的有深松检测传感、谷物水分传感、流量和转速传感等,这部分传感技术只能覆盖农机作业中的一部分参数,且有些作业信息需要设计专门的传感机构或装置进行检测,有些作业参数目前还难以检测,如实际的插秧深度、实际的喷施作业效果等。传感技术限制了目前农机管理系统上的数据来源,相关的传感技术亟需快速发展,而平台需要在此过程中不断地支持新的传感器的集成。
另外,这类综合性的农机作业管理平台还需要与各种企业配套的专用农机或农机管理平台配合。很多农机生产企业已提供了适合自己本企业的农业管理平台,依据标准协议建立接口,协同完成大田农机作业的管理。
随着农机作业管理平台的大规模应用及大量农机作业传感数据的集成,农机管理平台的应用有利于真实的管理数据的获取,减少人为因素对数据的干扰。大量农机作业数据也有利于农机作业的行为分析和农机工况分析等,最终将有助于农机合作社、农机手、农户及农机企业提高管理效率、提升产能。平台也完全可以实现控制农机,当5G技术逐渐应用普及时,农机作业管理平台将逐渐成为大田农机作业的管理中心及大田数字农业中心,实现精细农业按需作业目标,最终在保护环境的前提下,保证大田农业的可持续发展,并使每个农产品消费者也从中获益。
参考文献:
[1] WANG N, ZHANG N, WANG M. Wireless sensors in agriculture and food industry—Recent development and future perspective[J]. Computers and Electronics in Agriculture, 2006, 50: 1-14.
[2] 刘碧贞, 黄华, 祝诗平, 等. 基于北斗/GPS的谷物收割机作业综合管理系统[J]. 农业工程学报, 2015, 31(10): 204-210.
LIU B, HUANG H, ZHU S, et al. Integrated management system of grain combine harvester based on Beidou & GPS [J]. Transactions of the CSAE, 2015, 31(10): 204-210.
[3] 刘振宇, 梁建平. 基于BDS的农机精确调度和高效作业平台设计与应用[J]. 中国农机化学报, 2018, 39(10): 97-102.
LIU Z, LIANG J. Design and application of precision scheduling and efficient operation platform for agricultural machinery based on BDS [J]. Journal of Chinese Agricultural Mechanization, 2018, 39(10): 97-102.
[4] 叶文超, 张小花, 廖东东, 等. 基于Android的农机调度与管理平台设计与应用[J]. 仲恺农业工程学院学报, 2019, 32(3): 53-57.
YE W, ZHANG X, LIAO D, et al. Design and application of agricultural machinery scheduling and management platform based on Aandroid [J]. Journal of Zhongkai University of Agriculture and Engineering, 2019, 32(3): 53-57.
[5] 张俊艺, 冯泽佳, 高磊, 等. 基于Android系统的农机调度管理平台的设计与开发[J]. 中国农机化学报, 2018, 39(5): 91-96.
ZHANG J, FENG Z, GAO L, et al. Design and development of agricultural machinery dispatching management platform based on Android system [J]. Journal of Chinese Agricultural Mechanization, 2018, 39(5): 91-96.
[6] 刘娜. 农机信息化综合服务平台设计——基于智慧城市嵌入式快递系统[J]. 农机化研究, 2020, 42(5): 196-200.
LIU N. Design of agricultural machinery information integrated service platform based on intelligent express delivery system of smart city [J]. Journal of Agricultural Mechanization Research, 2020, 42(5): 196-200.
[7] 王春山, 张璠, 滕桂法, 等. 智慧农机调配管理平台设计与实现[J]. 中国农机化学报, 2018, 39(1): 61-68.
WANG C, ZHANG F, TENG G, et al. Design and implementation of smart agricultural machinery platform[J]. Journal of Chinese Agricultural Mechanization, 2018, 39(1): 61-68.
[8] 姚强, 郭彩霞, 吕斌. 农业机械远程管理信息系统研究[J]. 农业网络信息, 2018 (2): 26-32.
YAO Q, GUO C, LYU B, et al. Research on the remote management information system of agricultural machinery[J]. Agriculture Network Information, 2018 (2): 26-32.
[9] 刘文娜. 农业机械远程控制管理与农机化信息服务[J]. 河北农机, 2015(4): 35.
LIU W. Agricultural machinery remote control management and agricultural mechanization information service [J]. Hebei Agricultural Machinery, 2015(4): 35.
[10] 刘阳春, 苑严伟, 张俊宁. 深松作业远程管理系统设计与试验[J]. 农业机械学报, 2016, 47(S1): 43-48.
LIU Y, YUAN Y, ZHANG J, et al. Design and experiment of remote management system for subsoiler [J]. Transactions of the CSAM, 2016, 47(S1): 43-48.
[11] 蒋浩. 基于RTK技术的农业机械自动导航系统研究[D]. 杭州: 浙江大学, 2019.
JIANG H. Research on automatic navigation system of agricultural machinery based on RTK technology[D]. Hangzhou: Zhejiang University, 2019.
[12] GAO W, PAN S, GAO C, et al. Tightly combined GPS and GLONASS for RTK positioning with consideration of differential inter-system phase bias[J]. Measurement Science and Technology, 2019, 30(5): ID 054001.
[13] 庄晓霖. 基于机器视觉的路径识别及避障导航系统[D]. 广州: 华南农业大学, 2016.
ZHUANG X. Path recognition and obstacle avoidance navigation system based on machine vision [D]. Guangzhou: South China Agricultural University, 2016.
[14] HARIK E C, KORSAETH A. Combining hector slam and artificial potential field for autonomous navigation inside a greenhouse[J]. Robotics, 2018, 7(2): ID 22.
[15] 孟庆宽, 张漫, 杨耿煌, 等. 自然光照下基于粒子群算法的农业机械导航路径识别[J]. 农业机械学报, 2016(6): 356-360.
MENG Q, ZHANG M, YANG G, et al. Guidance line recognition of agricultural machinery based on particle warm optimization under natural illumination[J]. Transactions of the CSAM, 2016(6): 356-360.
[16] 王雪阳, 苑侗侗, 苑迎春, 等. 带时间窗的农机调度方法研究[J]. 河北农业大学学报, 2016, 39(6): 117-123.
WANG X, YUAN T, YUAN Y, et al. A study on method of agricultural scheduling with time-window [J]. Journal of Agricultural University of Hebei, 2016, 39(6): 117-123.
[17] EDWARDS G T C, HINGE J, SKOU-NIELSEN N, et al. Route planning evaluation of a prototype optimised infield route planner for neutral material flow agricultural operations[J]. Biosystems Engineering, 2017, 153: 149-157.
[18] CONESA-MUÑOZ J, BENGOCHEA-GUEVARA J M, ANDUJAR D, et al. Route planning for agricultural tasks: A general approach for fleets of autonomous vehicles in site-specific herbicide applications[J]. Computers and Electronics in Agriculture, 2016, 127: 204-220.
[19] SETHANAN K, NEUNGMATCHA W. Multi-objective particle swarm optimization for mechanical harvester route planning of sugarcane field operations[J]. European Journal of Operational Research, 2016, 252(3): 969-984.
[20] SEYYEDHASANI H, DVORAK J S. Reducing field work time using fleet routing optimization[J]. Biosystems Engineering, 2018, 169: 1-10.
[21] SPINGAEL J, PATERNOSTER A, BRAET J. Reducing postharvest losses of apples: Optimal transport routing (while minimizing total costs)[J]. Computers and Electronics in Agriculture, 2018, 146: 136-144.
[22] SEYYEDHASANI H, DVORAK J S. Using the vehicle routing problem to reduce field completion times with multiple machines[J]. Computers and Electronics in Agriculture, 2017, 134: 142-150.
[23] 王文权. 带时间窗农机调度问题模型及算法研究[D]. 杭州: 浙江大学, 2019.
WANG W. Research on models and algorithms for agricultural machinery scheduling problem with time window[D]. Hangzhou: Zhejiang University, 2019.
Development and Application of an Intelligent Remote Management Platform for Agricultural Machinery
ZHU Dengsheng1, FANG Hui2*, HU Shaoming
3, WANG Wenquan2, ZHOU Yansuo3, WANG Hongyan4, LIU Fei2, HE Yong2
(1.Jinhua Polytechnic, Jinhua 321007, China; 2.College of Biosystems Engineering and Food Science, Zhejiang University, Hangzhou 310058, China; 3.Zhejiang Raisinn Technology Co., Ltd., Hangzhou 310053, China;
4.West Electronic Business Co., Ltd., Yinchuan 310053, China)
Abstract: In order to solve problems such as the lack of real-time data in agricultural machinery management, the difficulty in real-time machine operation supervision and the asymmetry of machine service information, an intelligent remote management platform was developed in this research. Firstly, five design principles of a specialized remote agricultural machinery management system: specialization, standardization, cloud platform, modularity and openness were proposed. Based on these principles, a customizable general-purpose intelligent remote management system for agricultural machinery based on intelligent sensing technology, Internet of Things technology, positioning technology, remote sensing technology and geographic information system was designed. Practical modules, including agricultural machinery information-based and location-based services using WebGIS, real-time monitoring and management of machinery operation, basic information management of farmland, basic information management of crops in the field, dispatching management of machinery, subsidy management of machinery, order management of machinery operation were designed and implemented in the platform for users of government agencies, agricultural machinery corporations, machine operators, and farmers. Besides, some key technologies of the platform under the current technical background, including the calculation method of the working area with low-precision GNSS positioning receivers, the analysis of anomality data during the processing of GNSS positioning data, the machine scheduling algorithm development, the integration of sensors were focused, analyzed and implementd. The idea of building the machinery management platform with each inpidual field as the building block was developed. It can be predicted that the agricultural machinery operation management platform would gradually change from simple operation management to field-level comprehensive management. The research and development of this platform can not only solve current machinery management problems, but also provide basic functions for development of similar machinery management platforms.
Key words: sensing technology; data fusion; management platform; farm machinery; IoT; GNSS

收稿日期:2020-04-15 修订日期:2020-06-14
基金项目:复杂农田环境下农机导航精准定位技术与装置(2017YFD0700401),宁夏回族自治区重点研发计划重大科技项目(2017BY067),浙江省“数字农机”资源库开发与研究(2017C02031)
作者简介:朱登胜(1962-),男,硕士,教授,研究方向为管理学。E-mail:jh8789@sina.com。
*通讯作者:方 慧(1973-),女,博士,副研究员,研究方向为农业工程,数字农业。电话:13588433933。E-mail:hfang@zju.edu.cn。
doi: 10.12133/j.smartag.2020.2.2.202004-SA006

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号