上海市城市建设工程学校(上海市园林学校) 200232
摘 要 利用全站仪对地铁盾构横断面进行观测,根据测量数据通过拟合分析其变形情况,本文利用最小二乘法对采集的数据进行处理,根据所得的结果分析其断面的变形情况。
关键词 平面拟合;圆拟合;平整度;圆度变形;最小二乘
1.引言
对于空间圆形物体,在实际和设计时会存在差异或者是在长期使用后会发生形变而影响
其使用情况,因此必须对空间圆形物体进行检测,判断其是否满足工程要求[1]。
在地铁、隧道等的施工过程中,管片以及钢模拼接时经常要进行设计断面与实际断面的比较检测,由于其断面都是一个空间圆形,所以都可以看作为是空间圆形物体的检测问题。本文以盾构横断面为例,阐述检测空间圆形物体变形的方法及步骤,传统的空间圆的拟合方法,把三维空间的圆形看成是二维的平面。本文利用最小二乘拟合法对地铁盾构横断面的实测数据进行处理并分析断面的变形情况。
2.观测及算法原理
2.1 数据采集
在断面四周适当位置安置棱镜,棱镜的位置可根据工程的要求分布,在面前任意找一点安置全站仪,确定测站坐标和零方向,这样就形成了一个自定义的坐标系 o-xyh即可进行测量,测量各点的平面坐标和高程,若要提高精度,可以增加测回数[3]。
2.2 最小二乘拟合法
2.2.1 平面拟合
平面方程为
![]() (1)
(1)
式中![]() 为平面的法线方向单位矢量,a>0,若a=0则b>0,若a=0且b=0则c>0,a、b、c不可能同时为0。以
为平面的法线方向单位矢量,a>0,若a=0则b>0,若a=0且b=0则c>0,a、b、c不可能同时为0。以![]()
![]() 表示观测点坐标。
表示观测点坐标。
设i点至平面的距离t为:
![]() (2)
(2)
则误差方程为:
![]() (3)
(3)
按最小二乘![]() 求出平面方程的四个参数a、b、c、d来确定此空间平面,其中权阵p可以取为单位阵或者根据工程要求确定。
求出平面方程的四个参数a、b、c、d来确定此空间平面,其中权阵p可以取为单位阵或者根据工程要求确定。
在求出平面方程后,各观测点至平面的距离就是改正数![]() ,i点在平面上的投影点坐标
,i点在平面上的投影点坐标![]() 为:
为:
 (4)
(4)
2.2.2 坐标转换
为了方便计算,将测量坐标系中的点位坐标转换为平面坐标系中坐标。在求得所有测定点在平面上的投影点坐标![]()
![]() 后,建立平面坐标系
后,建立平面坐标系![]() ,此坐标系的两个轴
,此坐标系的两个轴![]() 、
、![]() 处在平面内,
处在平面内,![]() 轴与平面法线方向一致,各投影点在平面坐标系中的高程
轴与平面法线方向一致,各投影点在平面坐标系中的高程![]() 。
。
平面坐标系的原点![]() 点在测量坐标系
点在测量坐标系![]() 中的坐标定义为:
中的坐标定义为:
 (5)
(5)
![]() 轴在测量坐标系
轴在测量坐标系![]() 中的方向定义为
中的方向定义为![]() 点至面内某点(除
点至面内某点(除![]() 点)的方向,假设为
点)的方向,假设为![]() 至点
至点![]() 的方向
的方向![]() :
:
 (6)
(6)
![]() 轴在测量坐标系
轴在测量坐标系![]() 中的方向就是平面的法线方向
中的方向就是平面的法线方向![]() :
:
 (7)
(7)
![]() 轴在测量坐标系
轴在测量坐标系![]() 中的方向是
中的方向是![]() 和
和![]() 的叉乘方向:
的叉乘方向:
![]() (8)
(8)
 (9)
(9)
 (10)
(10)
这样就得到平面坐标系![]() 的三个坐标轴
的三个坐标轴![]() 、
、![]() 、
、![]() 在测量坐标系
在测量坐标系![]() 中的方向矢量,于是平面上任意点
中的方向矢量,于是平面上任意点![]() 与其在测量坐标系
与其在测量坐标系![]() 中的点
中的点![]() 之间的关系为:
之间的关系为:
 (11)
(11)
式中的R为旋转矩阵:
 (12)
(12)
反之,测量坐标系![]() 中的点
中的点![]() 与平面坐标系
与平面坐标系![]() 中点
中点![]() 的转换关系为:
的转换关系为:
 (13)
(13)
利用上述转换方法,可以将投影点的坐标由测量坐标系转换到平面坐标系中,用于平面圆的拟合。
2.2.3 圆拟合
经过以上转换,所有测定点都由o-xyh坐标系中的点归算到了平面上,以![]() 表示各投影点在oo-xxyyhh中的平面坐标。
表示各投影点在oo-xxyyhh中的平面坐标。
设圆的方程为:
![]() (14)
(14)
式中![]() 是圆心坐标,R是圆的半径。对于点
是圆心坐标,R是圆的半径。对于点![]() ,列出误差方程:
,列出误差方程:
![]() (15)
(15)
按![]() 便可求得圆心坐标和圆半径,权阵
便可求得圆心坐标和圆半径,权阵![]() 可选为单位阵或者也可根据实际情况确定,式中的
可选为单位阵或者也可根据实际情况确定,式中的![]() 就是各点至圆周的距离也就是空间圆度的变形量。
就是各点至圆周的距离也就是空间圆度的变形量。
3.算例分析
表1是在盾构断面测定的8个坐标点,为了拟合的准确性,需要在圆周上均匀的布点。
表1 原始数据
| 原 始 数 据 | |||
| 点 号 | x(m) | y(m) | h(m) |
| 1 2 3 4 5 6 7 8 | 10.992 10.948 10.972 10.993 10.995 10.987 10.995 10.984 | 7.536 11.472 12.540 10.979 7.546 3.603 2.537 4.090 | 6.988 5.080 1.096 -1.632 -3.009 -1.079 1.991 5.651 |
测得的这些圆周点的空间分布情况如图1
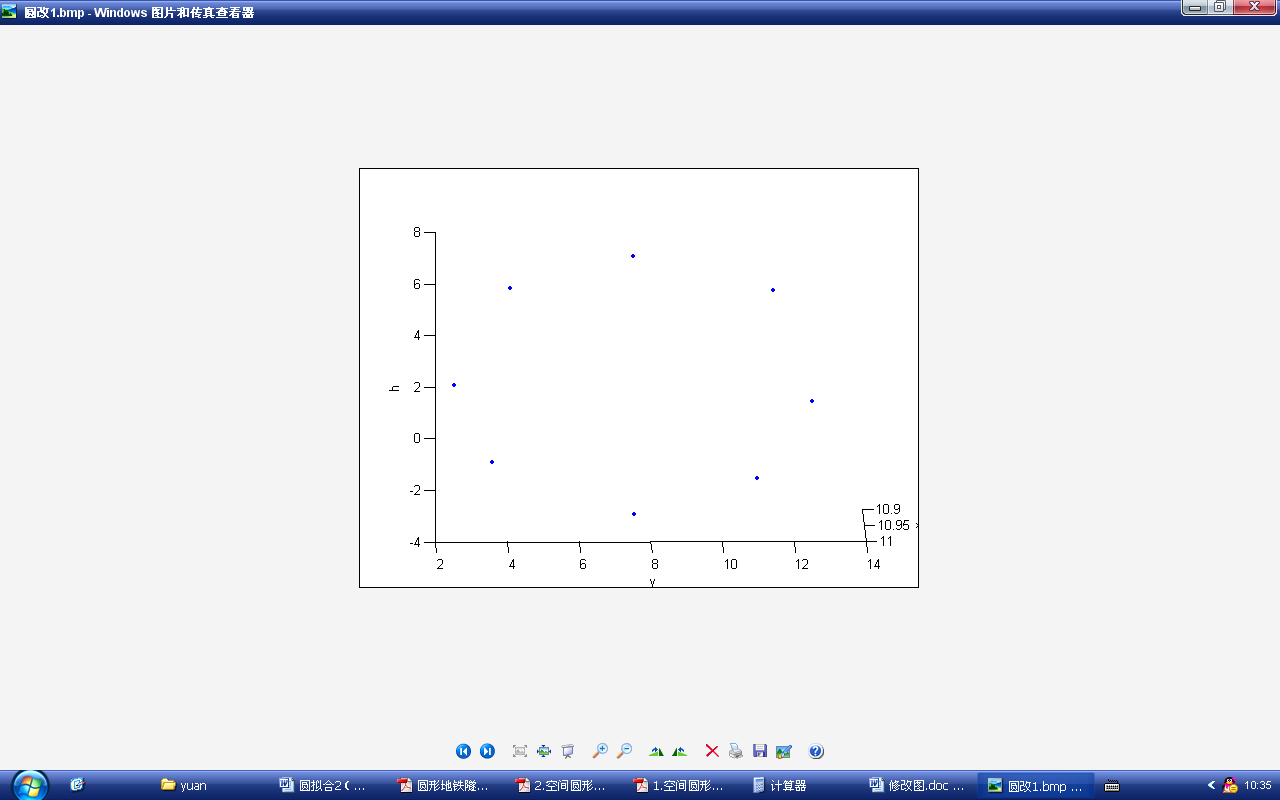
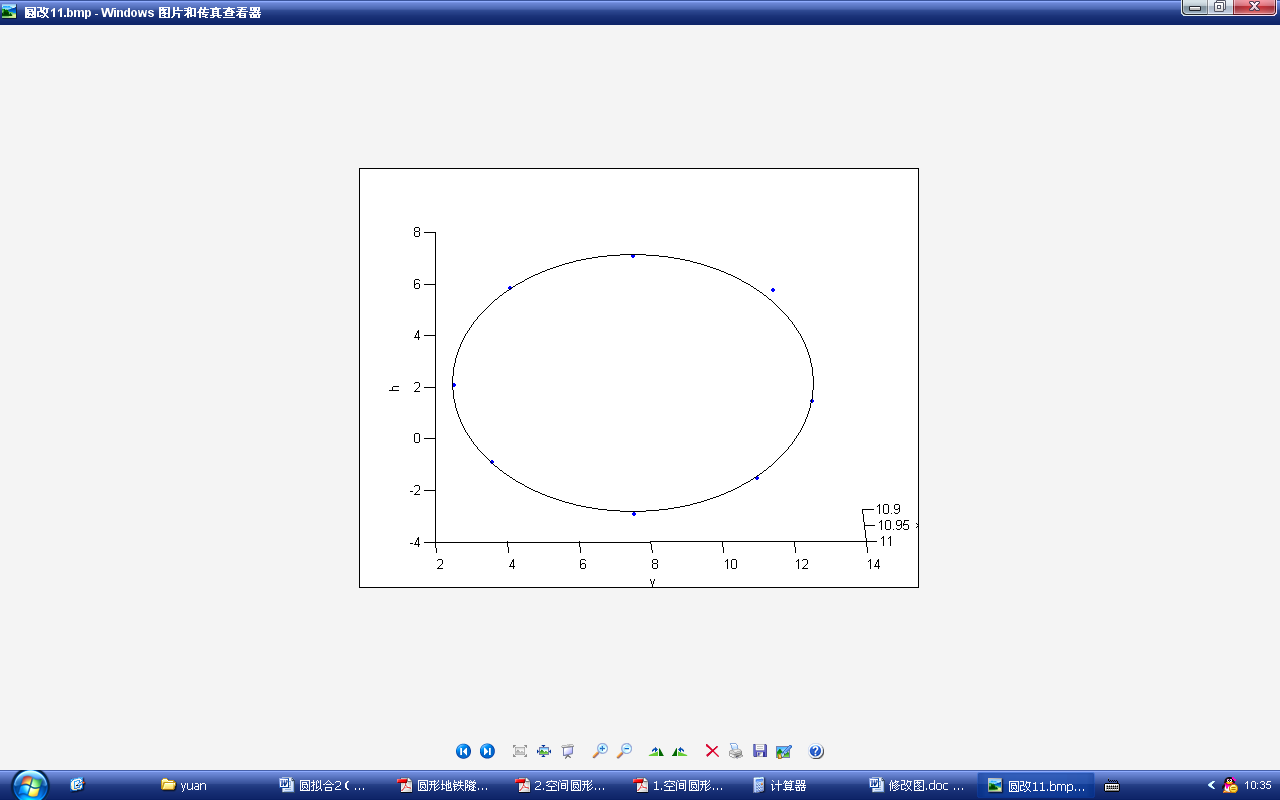
图1 原始测点分布情况 图2 拟合圆与原测点关系
表2 两种拟合方法结果比较
| 拟合方法 | 最小二乘法 | |
| 拟合中误差(m) | 0.0324 | |
| 拟合半径(m) | 5.012236628 | |
| 点号 | 点面距(m) | 点圆距(m) |
| 1 2 3 4 5 6 7 8 | -0.0405 -0.0240 0.0150 0.0153 0.0275 0.0268 -0.0016 -0.0186 | -0.0199 -0.0260 0.0541 -0.0234 -0.0077 -0.0058 0.0050 0.0239 |
根据平面拟合算法编程实现空间平面拟合,得出此空间圆所在的平面方程为:
![]()
所得圆的参数为圆心(10.986949308,7.554189997,1.995575827)、半径5.012236628m。此方法求出来的半径大于断面的设计半径5m,说明断面的半径增大了12.2mm。与设计圆心(10.9893,7.535,2.000)相比,在X、Y、Z三个方向的坐标差分别为-2.351mm、+19.19mm、-4.423mm,所以实际圆心位置偏离设计圆心位置的距离为19.83296mm。
表2中的点面距反映了该空间平面的平整度,点圆距反映了圆度变形,所以表中的点面距和点圆距就反应了盾构断面的变形情况。
4.结论
本文介绍了空间圆形物体的检测方法,利用全站仪观测盾构断面的空间坐标,拟合出空间平面方程和圆的方程,各观测坐标至平面的距离即可反映物体平面的平整度,各点至圆周的距离就是该圆的变形程度,实例中断面半径比设计时增大了12.2mm且圆心偏离设计位置19.83296mm,各点的变形情况如图2所示。
参考文献:
[1]王解先,季凯敏.工业测量拟合[M].北京:测绘出版社,2008.
[2]潘国荣,陈晓龙.空间圆形物体拟合新方法[J].大地测量与地球动力学.2008年4月第28卷第2期:92-94
[3]王解先,赵向阳.圆形轨道变形测量[J].工程勘察.2003年第4期:60-62.
[4]李清玉.三维坐标测量数据处理及可视化技术研究[D].哈尔滨工业大学,2004.
[5]陈基伟.工业测量数据拟合研究[D].同济大学,2005.
[6]王清泉,闫保旭,王解先.长方形立面检测方法研究[J].测绘通报.2008年第8期:48-50.
[7]田洪祯,田林.空间长方形设备监测[J].科技信息.2007年第11期:46-47.
作者简介:杨丽(1985~)女,江苏淮安人,上海市城市建设工程学校(上海市园林学校),测量专业课教师

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



